

Wektory w kosmosie Jak wykres, aplikacje, ćwiczenia
- 3925
- 4
- Prokul Woliński
A wektor w przestrzeni Wszystko to jest reprezentowane przez układ współrzędnych podany przez X, I I z. Prawie zawsze samolot Xy Jest płaszczyzną powierzchni poziomej i osi z reprezentuje wysokość (lub głębokość).
Kartezjańskie osie współrzędnych pokazane na rycinie 1, dzielą przestrzeń na 8 obszarów zwanych Octaczniki, analogiczne do sposobu, w jaki osie X - I Podziel samolot na 4 ćwiartki. Następnie będziemy mieli 1 Octant, 2. Ocanto i tak dalej.
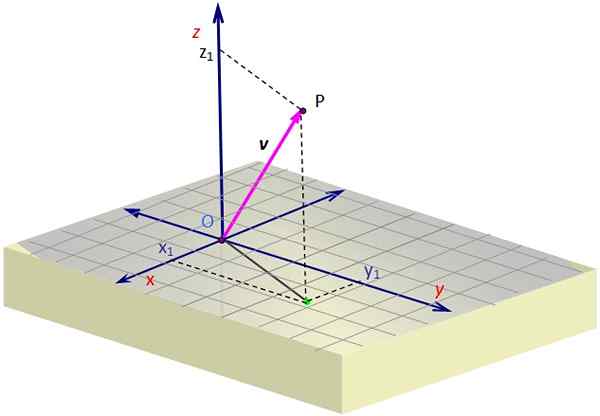
Rysunek 1. Wektor w przestrzeni. Źródło: Self Made. Rycina 1 zawiera reprezentację wektora v w kosmosie. Wymagana jest pewna perspektywa, aby stworzyć iluzję trzech wymiarów na płaszczyźnie ekranu, który osiąga się poprzez rysowanie ukośnego widoku.
Aby wykres wektor 3D, musisz pomóc w kropkowanych liniach, które określają współrzędne projekcji lub „cienia” siatki v Nad powierzchnią x-i. Ta projekcja zaczyna się w O i kończy się w zielonym punkcie.
Po tym musisz kontynuować przez pionową do wysokości (lub głębokości) niezbędną zgodnie z wartością z, Dopóki nie dojdziesz do P. Wektor jest pobierany z O i kończące się P, który w przykładzie znajduje.
[TOC]
Aplikacje
Wektory w przestrzeni są szeroko stosowane w mechanice i innych gałęziach fizyki i inżynierii, ponieważ otaczające nas struktury wymagają geometrii w trzech wymiarach.
Wektory pozycyjne w przestrzeni są używane do pozycjonowania obiektów w odniesieniu do nazywanego punktu odniesienia pochodzenie ALBO. Dlatego są również niezbędnymi narzędziami w nawigacji, ale to nie wszystko.
Może ci służyć: fale elektromagnetyczne: teoria Maxwella, typy, cechySiły działające na struktury takie jak śruby, podporki, kable, rozpórki i inne są wektorami i są zorientowane w przestrzeni. Aby znać jego wpływ, konieczne jest znanie twojego adresu (a także punktu aplikacji).
I często kierunek siły jest znany z dwóch punktów w przestrzeni, która należą do jej linii działania. W ten sposób siła to:
F = F Lub
Gdzie f jest wielkością lub modułem siły i Lub Jest to wektor jednostkowy (moduł 1) skierowany wzdłuż linii działania F.
Notacja wektora 3D i reprezentacje
Przed rozwiązaniem niektórych przykładów zapis wektorów 3D zostanie krótko przejrzany.
W przykładzie na rycinie 1 wektor V, którego punkt pochodzenia pokrywa się z pochodzeniem lub którego zakończenie jest punktem P, ma współrzędne X I z pozytywny, podczas gdy koordynuje I To jest negatywne. Te współrzędne to: X1, I1, z1, które są dokładnie współrzędnymi p.
Więc jeśli mamy wektor powiązany z pochodzeniem, to znaczy, którego punkt początkowy pokrywa się z O, bardzo łatwo jest wskazać jego współrzędne, które będą te z punktu ekstremalnego lub p. Aby rozróżnić punkt od wektora, użyjemy najnowszych odważnych liter i nawiasów, takich jak ten:
v = < x1, I1, z1 >
Podczas gdy punkt P jest oznaczony nawiasami:
P = (x1, I1, z1)
Kolejna reprezentacja korzysta z wektorów jednostkowych Siema, J I k które definiują trzy kierunki przestrzeni w osiach X, I I z odpowiednio.
Te wektory są prostopadłe do siebie i tworzą Baza ortonormalna (Patrz Rysunek 2). Oznacza to, że wektor 3D może być napisany jako:
Może ci służyć: pofalowany ruch: cechy, rodzaje fal, przykładyv = vX Siema + vI J + vz k
Kąt i dyrektorzy wektora Cosenos
Rycina 2 pokazuje także reżyserów γ kąt1, γ2 i γ3 niż wektor v odpowiednio z osiami X, I I z. Znając te kąty i wielkość wektora, jest to całkowicie ustalone. Ponadto cosinus dyrektorów spełniają następujący związek:
(cos γ1)2 + (cos γ2)2 + (cos γ3)2 = 1
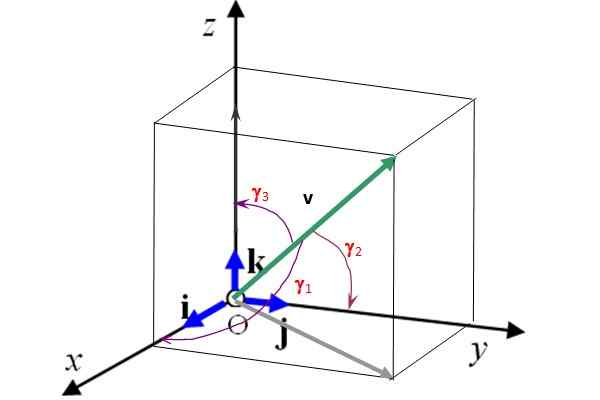 Rysunek 2. Wektory jednolitowe I, J i K, określają 3 preferencyjne kierunki przestrzeni. Źródło: Self Made.
Rysunek 2. Wektory jednolitowe I, J i K, określają 3 preferencyjne kierunki przestrzeni. Źródło: Self Made. Rozwiązane ćwiczenia
-Ćwiczenie 1
Na rycinie 2 kąty γ1, γ2 i γ3 niż wektor v formularza modułu 50 z osi współrzędnych to odpowiednio: 75.0º, 60.0º i 34.3. Znajdź komponenty kartezjańskie tego wektora i reprezentuj go w kategoriach wektorów jednostkowych Siema, J I k.
Rozwiązanie
Projekcja wektora v na osi X jest vX = 50 . Cos 75º = 12.941. Podobnie projekcja v na osi I jest vI = 50 cos 60 º = 25 i na koniec na osi z jest vz = 50. cos 34.3rd = 41.3. Teraz v można wyrazić jako:
v = 12.9 Siema + 25.0 J + 41.3 k
-Ćwiczenie 2
Znajdź napięcia w każdym z kabli, które trzymają wiadro figury, która jest w równowadze, jeśli ciężar wynosi 30 n.
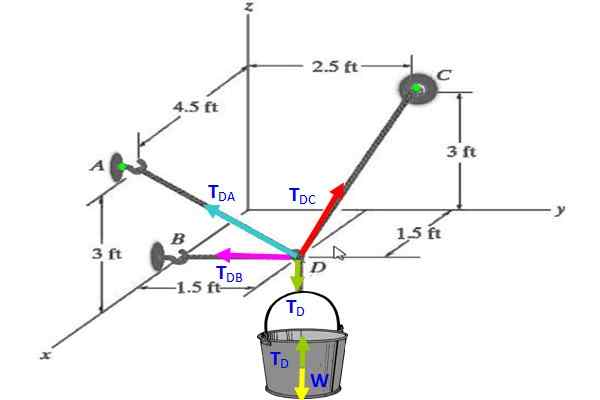 Rysunek 3. Schemat napięć do ćwiczeń 2.
Rysunek 3. Schemat napięć do ćwiczeń 2. Rozwiązanie
Na wiadrze schemat wolnego ciała wskazuje TD (zielony) kompensuje wagę W (żółty), dlatego tD = W = 30 n.
W węzłach wektor TD Jest skierowany w pionowo, zatem:
TD = 30 (-k) N.
Aby ustalić pozostałe napięcia, musisz wykonać następujące kroki:
Krok 1: Znajdź współrzędne wszystkich punktów
A = (4.5; 0; 3) (A jest na płaszczyźnie ściany X-Z)
B = (1.5; 0; 0) (B znajduje się na osi x)
Może ci służyć: adres (fizyczny)C = (0, 2.5, 3) (C jest na płaszczyźnie ściany i z)
D = (1.5; 1.5; 0) (D znajduje się na płaszczyźnie poziomej x-i)
Krok 2: Znajdź wektory w każdym kierunku, odejmując współrzędne końca i początek
Daje =
DC =
Db =
Krok 3: Oblicz moduły i wektory jednostkowe
Wektor jednostkowy jest uzyskiwany przez wyrażenie: Lub = R / r, z R (odważne) będąc wektorem i r (bez odważnego) moduł wspomnianego wektora.
DA = (32 + (-1.5)2 + 32)½ = 4.5; Dc = (-1.5) 2 + 12 + 32)½ = 3.5
LubDaje = 4.5 =
LubDC = 3.5 =
LubDb =
LubD =
Krok 4: Wyrażaj wszystkie napięcia jako wektory
TDaje = TDaje LubDaje = TDaje
TDC = TDC LubDC = TDC
TDb = TDb LubDb = TDb
TD = 30
Krok 5: Zastosuj stan równowagi statycznej i rozwiąż układ równań
Wreszcie warunek bilansu statycznego jest stosowany do wiadra, tak że suma wektora wszystkich sił na węzłach jest nieważna:
TDaje + TDC + TDb + TD = 0
Ponieważ napięcia są w przestrzeni, doprowadzi to do systemu trzech równań dla każdego komponentu (X, i i z) napięć.
0.67 tDaje -0.43 tDC + 0 tDb = 0
-0.33 tDaje + 0.29 tDC - TDb = 0
0.67 tDaje + 0.86 tDC +0 tDb - 30 = 0
Rozwiązaniem jest: tDaje = 14.9 N; TDaje = 23.3 N; TDb = 1.82 n
Bibliografia
- Bedford, 2000. DO. Mechanika inżynierii: statyczne. Addison Wesley. 38-52.
- Figueroa, zm. Seria: Fizyka nauk i inżynierii. Tom 1. Kinematyka.31-68.
- Fizyczny. Moduł 8: wektory. Odzyskane z: frtl.Utn.Edu.ar
- Hibbeler, R. 2006. Mechanika inżynierów. Statyczny. 6. edycja. Continental Editorial Company. 15-53.
- Wektor kalkulatora dodania. Odzyskane z: 1728.org
- « Obliczenia wektora równoważenia, przykłady, ćwiczenia
- Co to jest dolina w fizyce? (Z przykładami) »