

Twierdzenie varignon
- 1054
- 174
- Maksymilian Kępa
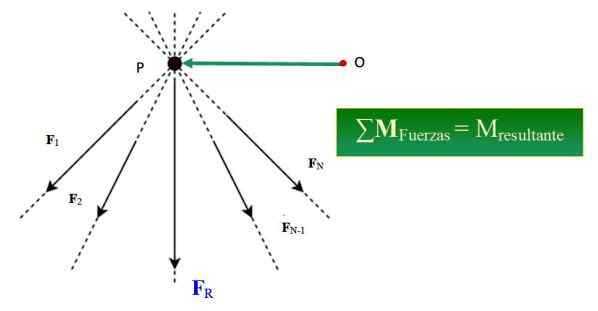
Rysunek 1.- Twierdzenie Varignona potwierdza, że suma momentu sił wokół określonego punktu jest równoważna czasowi wyniku w odniesieniu do tego punktu. Źródło: Wikimedia Commons/F. Zapata. Jakie jest twierdzenie Varignona?
Twierdzenie Varignona w mechanice stwierdza, że suma momentów wytwarzanych przez układ sił równoczesnych w odniesieniu do określonego punktu jest równa momentowi powstałej siły w odniesieniu do tego samego punktu.
Z tego powodu to twierdzenie to jest również znane jako Początek chwil.
Podczas gdy pierwszym, który stwierdził, był Holender Simon Stevin (1548-1620), twórca paradoksu hydrostatycznego, francuski matematyk Pierre Varignon (1654-1722) był tym, który następnie dał mu swoją ostateczną formę.
Przykład tego, jak działa twierdzenie Varignona w mechanice: Załóżmy, że prosty system dwóch coplanares i równoczesnych sił działa w danym punkcie F1 I F2, (Oznaczone odważnym dla swojego wektora). Siły te powodują powstanie siły netto lub wynikającej z tego FR.
Każda siła wywiera moment obrotowy lub moment w stosunku do punktu lub, który jest obliczany przez produkt wektorowy między wektorem pozycji ROp i Strengh F, Gdzie ROp Jest skierowany od lub do punktu zbieżności p:
MO1 = ROp × F1
MO2 = ROp × F2
Biorąc pod uwagę FR = F1 + F2, Więc:
MALBO = ROp × F1 + ROp × F2 = MO1 + MO2
Ale jak ROp Jest to zatem powszechny czynnik stosowania właściwości dystrybucyjnej do produktu krzyżowego:
MALBO = ROp × (F1 + F2) = ROp × FR
Dlatego suma momentów lub momentów każdej siły w odniesieniu do punktu lub jest równoważna czasowi powstałej siły w odniesieniu do tego samego punktu.
Oświadczenie i demonstracja
Być systemem n równoległych sił, utworzonych przez F1, F2, F3.. FN, którego linie działania są przeznaczone w punkcie P (patrz ryc. 1), moment tego systemu siły MALBO, Dotyczące punktu lub jest podane przez:
Może ci służyć: niestabilna równowaga: koncepcja i przykładyMALBO = ROp × F1 + ROp × F2 + ROp × F3 +.. ROp × FN = ROp × (F1 + F2 + F3 +.. FN)
Demonstracja
Aby zademonstrować twierdzenie, wykonana jest właściwość dystrybucyjna produktu wektorowego między wektorami.
Być siłami F1, F2, F3.. FN zastosowane do punktów1, DO2, DO3… DON i równolegle w punkcie P. Wynikowy moment tego systemu, w odniesieniu do punktu lub, nazywany MALBO, Jest to suma momentów każdej siły, w odniesieniu do tego punktu:
MALBO = ∑ ROai × FSiema
Gdzie suma przechodzi od i = 1 do i = n, ponieważ istnieją n siły. Ponieważ są to siły równoczesne, a ponieważ produkt wektorowy między wektorami równoległymi jest zerowy, zdarza się, że:
RPai × FSiema = 0
Z wektorem zerowym oznaczonym jako 0.
Moment jednej z sił dotyczących o, na przykład siły FSiema zastosowane wSiema, Jest napisane w ten sposób:
Msłyszałem = ROai × FSiema
Wektor pozycji ROai Można go wyrazić jako sumę pozycji dwóch wektorów:
ROai = ROp + RPai
W ten sposób moment w odniesieniu do lub siły FSiema Jest:
Msłyszałem = (ROp + RPai) × FSiema = (ROp × FSiema) + (RPai × FSiema)
Ale ostatni termin jest zerowy, jak wyjaśniono powyżej, ponieważ RPai jest na linii działania FSiema, W związku z tym:
Msłyszałem = ROp × FSiema
Wiedząc, że moment systemu w odniesieniu do punktu lub jest sumą wszystkich indywidualnych momentów każdej siły w odniesieniu do tego punktu:
MALBO = ∑ Msłyszałem = ∑ ROp × FSiema
Jak ROp To jest stałe, wychodzi z suma:
MALBO = ROp × (∑ FSiema)
Ale ∑ FSiema Jest to po prostu powstała siatka lub siła FR, Dlatego natychmiast stwierdzono, że:
Może ci służyć: Leyden Butelka: części, operacja, eksperymentyMALBO = ROp × FR
Przykład
Twierdzenie Varignona ułatwia obliczenie momentu siły F Jeśli chodzi o punkt lub strukturę pokazaną na rysunku, jeśli siła jest podzielona na jego prostokątne składniki i obliczany jest moment każdego z nich:
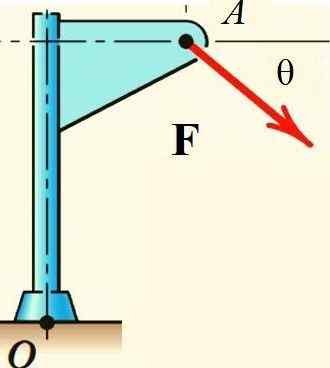 Rysunek 2.- Twierdzenie Varignona dotyczy obliczenia momentu siły wokół lub. Źródło: f. Zapata.
Rysunek 2.- Twierdzenie Varignona dotyczy obliczenia momentu siły wokół lub. Źródło: f. Zapata. Zastosowania twierdzenia varignon
Gdy znana jest siła wynikająca z systemu, twierdzenie Varignona można zastosować w celu zastąpienia suma każdego z momentów wytwarzanych przez siły, które tworzą ją w czasie powstałego.
Jeśli system składa się z sił na tej samej płaszczyźnie i punkcie, w odniesieniu do tego, że chcesz obliczyć moment, który należy do tej płaszczyzny, wynikowy moment jest prostopadły.
Na przykład, jeśli wszystkie siły znajdują się w płaszczyźnie XY, moment jest skierowany na oś Z i pozostaje tylko po to, by znaleźć jej wielkość i znaczenie, tak jest w przypadku przykładu opisanego powyżej.
W takim przypadku twierdzenie Varignona pozwala obliczyć moment wynikający z systemu poprzez podsumowanie. Jest to bardzo przydatne w przypadku systemu trzech sił w wymiarach, dla którego kierunek powstałego momentu nie jest znany a priori.
Aby rozwiązać te ćwiczenia, jest to wygodne.
Ćwiczenie rozwiązane
Według twierdzenia Varignona oblicz moment siły F wokół punktu lub pokazany na rysunku, czy wielkość F wynosi 725 n.
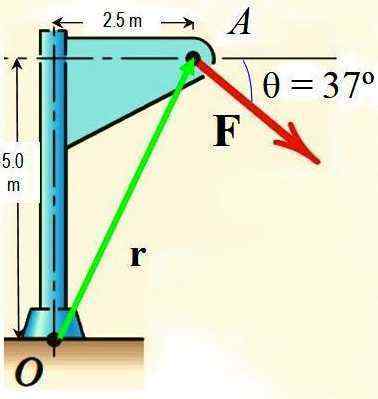 Rysunek 3.- Rysunek dla ćwiczenia rozwiązanego. Źródło: f. Zapata.
Rysunek 3.- Rysunek dla ćwiczenia rozwiązanego. Źródło: f. Zapata. Rozwiązanie
Aby zastosować twierdzenie Varignona, siła rozkłada się F w dwóch składnikach, których odpowiednie momenty wokół lub są obliczane i dodawane, aby uzyskać wynikowy moment.
Może ci służyć: sztywne ciałoFX = 725 N ∙ cos 37 º = 579.0 n
FI = - 725 N n ∙ Sen 37 º = −436.3 n
Podobnie wektor pozycji R skierowane z lub do a ma komponenty:
RX = 2.5m
RI = 5.0 m
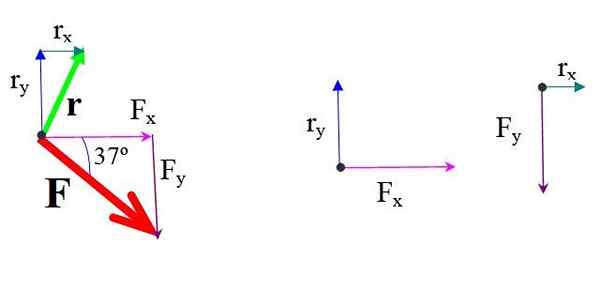 Rysunek 4.- Siła i pozycja komponentów. Źródło: f. Zapata.
Rysunek 4.- Siła i pozycja komponentów. Źródło: f. Zapata. Moment każdego elementu siły w odniesieniu do lub mnożą siłę i odległość prostopadłą.
Obie siły mają tendencję do obracania struktury w tym samym kierunku, co w tym przypadku jest sensem wyniku, który jest dowolnie przypisany znakiem pozytywnym:
MWół = FX∙ rI ∙ Sin 90º = 579.0 n ∙ 5.0 m = 2895 n ∙ m
MOy = FI∙ rX ∙ sin (-90º) = −436.3 N ∙ 2.5 m ∙ (-1) = 1090.8 n ∙ m
Wynikowy moment w odniesieniu do lub jest:
MALBO = MWół + MOy = 3985.8 n ∙ m prostopadle do płaszczyzny i momentu obrotowego.
Bibliografia
- Bedford, 2000. DO. Mechanika inżynierii: statyczne. Addison Wesley.
- Piwo, f. 2010. Statyczny. McGraw Hill. 9na. Wydanie.
- Hibbeler, R. 1992. Mechanika inżynierów. 6th. Wydanie. Cecsa.
- HK Engineering. Twierdzenie varignon. Odzyskane z: YouTube.com.
- Wikipedia. Twierdzenie Varignona (mechanika). Źródło: w:.Wikipedia.org.