

Formuły i równania bilansu obrotowego, przykłady, ćwiczenia

- 3690
- 428
- Arkady Sawicki
Twierdzi się, że jest przedłużone ciało Bilans obrotowy Kiedy suma momentów, które działają na nią, wynosi zero. Nie oznacza to, że obiekt jest koniecznie w spoczynku, ale raczej, że nie ma trendu netto, aby zmienić swój stan ruchu na inny.
Obiekt, który porusza się ze stałą prędkością. Teraz obiekty obracają się, ponieważ istnieją siły, które działają na nich w taki sposób, że jest to rotacja. Zdolność siły do wytwarzania obrotu, zwanego momentem obrotowym lub Torca, Zależy to nie tylko od intensywności siły, ale także tego, gdzie jest stosowana.
Rysunek 1. Most wiszący figury został zaprojektowany tak, aby był w równowadze rotacji. Źródło: Wikimedia Commons. Rozpoznajemy to natychmiast, gdy otworzą się zamknięte drzwi: siła nigdy nie jest nakładana w pobliżu zawiasów, ale daleko od nich, więc uchwyt jest umieszczony jak najdalej, obok drzwi drzwi.
Zawiasy mija oś obrotu drzwi. Nalegając, aby popchnąć go bardzo blisko zawiasów, musisz podjąć duży wysiłek, aby drzwi mogły się trochę poruszyć.
W literaturze jest moment obrotowy o różnych nazwach: moment skrętu, skręt, moment siły i Torca. Wszystkie są synonimami.
Musimy więc znać momenty, które działają na obiekcie, aby ustalić warunek równowagi rotacji.
[TOC]
Warunek równowagi obrotowej
Warunkiem równowagi obrotowej jest:
Suma wszystkich momentów lub momentów, które działają na ciele, obliczone w odniesieniu do jakiejkolwiek osi, musi być nieważna.
Obiekt, o którym mowa, należy rozszerzyć, ponieważ cząstki z definicji mają tylko równowagę tłumaczeniową.
Możesz Ci służyć: drugie prawo Newtona: aplikacje, eksperymenty i ćwiczeniaMogą być stosowane siły na ciele i nadal istnieje równowaga obrotowa, podczas gdy siły tego nie obracają.
Może być również ruch, nawet przyspieszony, ale zawsze wzdłuż linii prostej, ponieważ nie wszystkie siły powodują wygląd obrotowych. Pojawiają się, gdy siły nie działają przez cały ten sam linia działania.
Moment obrotowy lub moment siły
Moment obrotowy jest oznaczony greckim tekstem τ, W pogrubiona czcionka Ponieważ jest to wektor i odróżniamy go od jego wielkości lub modułu, który jest skalar. To zależy od przyłożonej siły F, wektora R który jest skierowany ze osi obrotu lub do punktu zastosowania siły i wreszcie kąta między tymi dwoma wektorami.
Właściwy związek między tymi wielkościami jest ustalany przez produkt wektorowy:
τ = r X F
A moduł momentu obrotowego, oznaczony bez Bold, to:
τ = r⋅f⋅sen θ
Gdzie θ jest kątem pomiędzy R I F. Jednostki momentu obrotowego są po prostu N⋅m w systemie międzynarodowym.
Na rysunku znajduje się angielski klucz, z którym jest przeznaczony. W tym celu wypróbowywane są dwie siły FDO I FB.
FDO jest bliżej O i ma wektor RDO lub krótsze ramię dźwigni, dlatego nie wytwarza tyle momentu obrotowego i siły FB, Który ma tę samą wielkość, ale ma wektor RB większy.
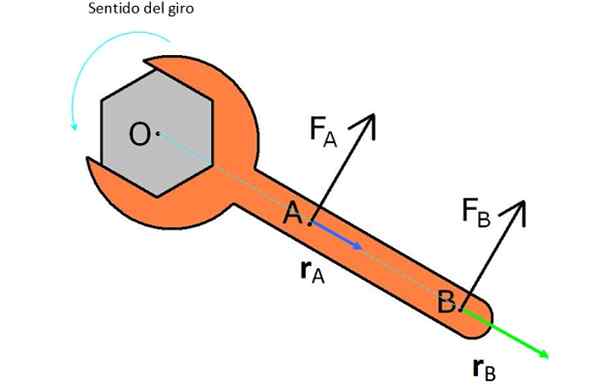 Rysunek 2. Siły i ramiona zastosowane do angielskiego klucza, aby przekształcić go wbrew igieł zegara. Źródło: Wikimedia Commons.
Rysunek 2. Siły i ramiona zastosowane do angielskiego klucza, aby przekształcić go wbrew igieł zegara. Źródło: Wikimedia Commons. Zauważ, że jeśli chcesz obrócić nakrętkę w harmonogramie, musisz zastosować siły w przeciwnym kierunku do tego, jak się pojawiają na rysunku.
Kierunek i poczucie momentu obrotowego
Ponieważ moment obrotowy wynika z produktu krzyżowego między wektorami wytrzymałości i pozycji, a są one w płaszczyźnie klucza angielskiego, moment obrotowy musi być wektorem prostopadłym do tej płaszczyzny, to znaczy skierowane w kierunku czytelnika lub wewnątrz strony.
Może ci służyć: ciśnienie atmosferyczne: wartość normalna, jak jest mierzone, przykładyZgodnie z konwencją moment obrotowy jest dodatni, jeśli wytwarza skręcenie w przeciwnym kierunku igieł zegara i negatywnie, jeśli to zrobi w kierunku zegara.
Kierunek i kierunek powstałego momentu obrotowego są łatwo określone przez zasadę prawej ręki pokazaną poniżej:
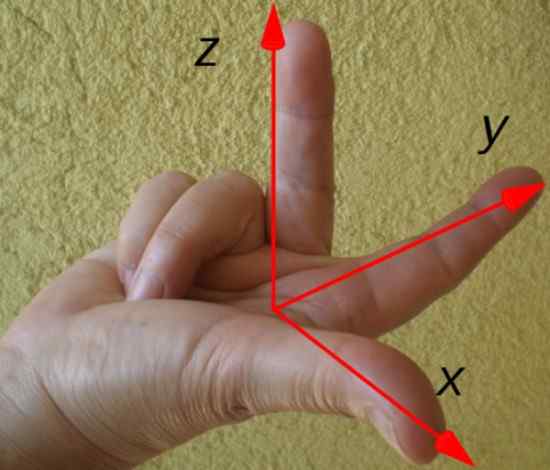 Rysunek 3. Reguła prawej ręki w celu ustalenia kierunku i kierunku Troca. Źródło: Wikimedia Commons.
Rysunek 3. Reguła prawej ręki w celu ustalenia kierunku i kierunku Troca. Źródło: Wikimedia Commons. Palec wskazujący według wektora pozycji R, Środkowy palec według siły F A kciuka sygnalizuje kierunek i kierunek momentu obrotowego τ. W tym przykładzie moment obrotowy jest kierowany wzdłuż osi x, zgodnie z rysunkiem osi współrzędnych.
Wzory i równania
Jeśli momenty działają na ciele τ1, τ2, τ3… τSiema, Sieć lub wynikowy moment obrotowy τN Jest to suma wektorowa z nich:
τN = τ1+ τ2 + τ3 +.. τSiema
Wraz z podsumowaniem podsumowania pozostaje:
τN = ∑ τSiema
Warunek równowagi jest wyrażany matematycznie w następujący sposób:
τN = 0
O Cóż:
∑ τSiema = 0
Gdzie moment obrotowy τ, Jeśli chodzi o pewną oś O, jest to obliczane przez:
τ = r X F
I czyje wielkość:
τ = r⋅f⋅sen θ
Przykłady
-U ludzi i zwierząt waga jest siłą, która może powodować moment obrotowy i obracania i upadku.
Ludzie zwykle utrzymują taką pozycję, że podczas chodzenia utrzymuje ich równowagę rotacji, chyba że ćwiczenie sportowe są praktykowane, takie jak gimnastyka, jazda na łyżwach lub sport.
-Dwoje dzieci, które udało się pozostać poziome w biegun albo w górę i w dół Są w równowadze rotacji.
-Gdy spodki równowagi są zrównoważone, układ jest w równowadze obrotowej.
-Powiadomienia i światła, które wiszą na ulicach i drogach, są również w równowadze rotacyjnej. Jeśli kable, które je trzymają.
Może ci służyć: średnie przyspieszenie: jak jest obliczane i rozwiązane-Wiszące mosty, takie jak Golden Gate w San Francisco i most z ryc. 1.
Ćwiczenie rozwiązane
Pasek obsługiwany przez podporę pokazaną na rysunku jest bardzo lekki. Siła wywierana przez wsparcie jest F a na koniec siła obowiązuje DO.
Poproszono o obliczenie wielkości tych sił, biorąc pod uwagę, że system jest w równowadze tłumaczenia i obrotu.
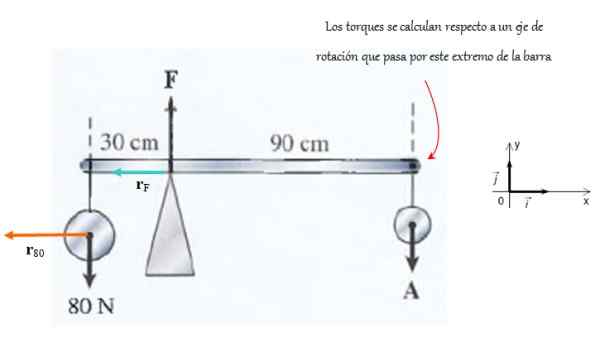 Rysunek 4. Na tej siłach baru działają w taki sposób, że pozostaje on w równowadze obrotowej. Źródło: f. Zapata.
Rysunek 4. Na tej siłach baru działają w taki sposób, że pozostaje on w równowadze obrotowej. Źródło: f. Zapata. Rozwiązanie
Ponieważ system się nie porusza, suma sił jest anulowana. Wszystkie są pionowe i możesz pracować z wielkościami. Dlatego pozytywne zmysł i negatywny w dół:
F - 80 - a = 0
Teraz stosuje się warunek równowagi obrotowej, dla którego musisz wybrać dowolną oś obrotu. W takim przypadku jest wybrany na końcu po prawej stronie, tak aby wektor RDO Bądź null, w ten sposób moment obrotowy DO, ale tylko ci z F i siła lewicy.
Moment obrotowy wytwarzany przez F Zgodnie z zasadą prawej ręki i pokazanym układem współrzędnych:
τF = RF X F = 0.9 F (-k) N.M
Jest skierowany na ekranie i ma znak ujemny. Podczas gdy moment obrotowy wytwarzany przez siłę 80 N to:
τ = 80 x 1.20 (k) N⋅m = 96 (k) N⋅m
Ten moment obrotowy jest kierowany z ekranu i przypisany jest znak pozytywny. Ponieważ istnieje równowaga obrotowa:
96 - 0.9⋅F = 0
Wielkość F Jest:
F = (96/0.9) n = 106.7 n
A ponieważ system jest w równowadze tłumaczeń, suma sił jest anulowana. To pozwala nam wyczyścić wielkość DO:
F - a - 80 n = 0
Dlatego:
A = 106.7 - 80 n = 26.7 n.
Bibliografia
- Rex, a. 2011. Podstawy fizyki. osoba.
- Serway, r., Jewett, J. (2008). Fizyka nauk i inżynierii. Tom 1. 7th. Wyd. Cengage Learning.
- Sears, Zemansky. 2016. Fizyka uniwersytecka z nowoczesną fizyką. 14. Wyd. Tom 1. osoba.
- Tipler, str. (2006) Physics for Science and Technology. Ed. Tom 1. Redakcja Reverted.
- Tippens, s. 1. 2011. Fizyka: koncepcje i zastosowania. 7. edycja. McGraw Hill.