

Ortonormalne właściwości podstawy, przykłady i ćwiczenia
- 809
- 95
- Arkady Sawicki
A Baza ortonormalna Powstaje z wektorów prostopadłych ze sobą i których moduł jest również wart 1 (wektory jednostkowe). Pamiętaj, że baza B w przestrzeni wektorowej V, Jest zdefiniowany jako zestaw wektorów niezależnych liniowych, które mogą generować tę przestrzeń.
Z kolei przestrzeń wektorowa jest abstrakcyjną istotą matematyczną między których elementami są wektory, ogólnie związane z wielkościami fizycznymi, takimi jak prędkość, wytrzymałość i przemieszczenie, lub także z matrycami, wielomianami i funkcjami.
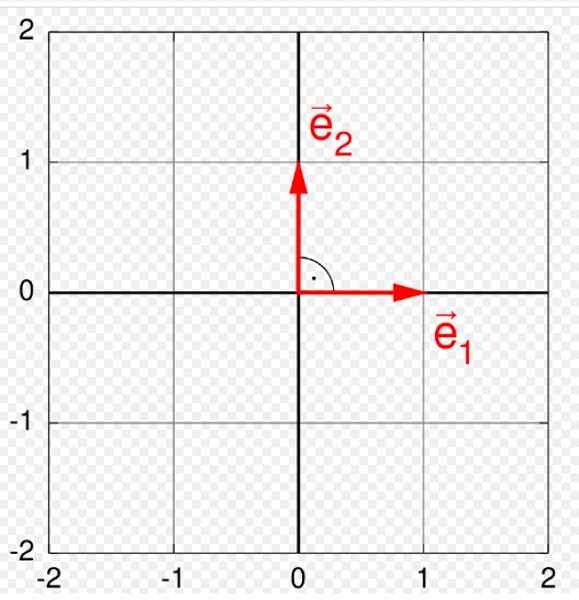
Rysunek 1. Podstawa ortonormalna w płaszczyźnie. Źródło: Wikimedia Commons. Quartl [CC BY-SA (https: // creativeCommons.Org/licencje/by-sa/3.0)]. Wektory mają trzy charakterystyczne elementy: wielkość lub moduł, kierunek i znaczenie. Baza ortonormalna jest szczególnie przydatna do reprezentowania i działania z nimi, ponieważ każdy wektor należący do określonej przestrzeni wektorowej V, Można go zapisać jako liniową kombinację wektorów, które tworzą podstawę ortonormalną.
W ten sposób operacje między wektorami, takimi jak suma, odejmowanie i różne typy produktów zdefiniowane we wspomnianej przestrzeni, są analizowane.
Wśród najczęściej używanych podstaw fizyki jest podstawa utworzona przez wektory jednostkowe Siema, J I k reprezentujące trzy charakterystyczne kierunki trzech wymiarów przestrzeni: wysokie, szerokie i głębokość. Wektory te są również znane pod nazwą Jednolite wektory kanoniczne.
Gdyby zamiast tego wektory będą działać w samolocie, wystarczyłoby to dwóm z tych trzech komponentów, a tylko jeden.
[TOC]
Podstawy właściwości
1- baza B Jest to najmniejszy możliwy zestaw wektorów, które generują przestrzeń wektorową V.
2- Elementy B Są liniowo niezależne.
3- Każda baza B przestrzeni wektorowej V, pozwala wyrażać wszystkie wektory V jako jego liniowa kombinacja, a ta forma jest unikalna dla każdego wektora. Dlatego B Jest również znany jako System generatora.
4- Ta sama przestrzeń wektorowa V może mieć różne podstawy.
Może ci służyć: siła odśrodkowa: formuły, jak jest obliczane, przykłady, ćwiczeniaPrzykłady baz
Poniżej kilku przykładów ortonormalnych zasad i zasad ogólnie:
Baza kanoniczna w ℜ N
Zwany także naturalną podstawą lub standardową podstawą ℜ N, Gdzie ℜ N To jest przestrzeń N-wymiarowy, Na przykład trzy -wymiar przestrzeni wynosi ℜ 3. Do wartości N Nazywa się wymiar przestrzeni wektorowej i oznacza jako Dim (v).
Wszystkie wektory należące do ℜ N Są reprezentowane przez N-usa Zamówiono. Dla przestrzeni ℜN, Baza kanoniczna to:
I1 =; I2 =; IN =
W tym przykładzie wykorzystaliśmy notację z nawiasami lub „wspornikami” i odważnym dla wektorów jednostkowych I1, I2, I3..
Baza kanoniczna w ℜ3
Wektory rodzinne Siema, J I k Przyznają tę samą reprezentację i wystarczą do trzech, aby reprezentować wektory w ℜ 3:
Siema =; J =; k =
Oznacza to, że podstawę można wyrazić w następujący sposób:
B = ; ;
Aby sprawdzić, czy są one liniowo niezależne, wyznacznik utworzony z nimi wektorów nie jest zerowy, a także równy 1:

F = N = 4Siema -7J + 0k N.
Dlatego Siema, J I k Ustaw system generatora ℜ 3.
Inne bazy ortonormalne w ℜ3
Standardowa podstawa opisana w poprzednim rozdziale nie jest jedyną bazą ortonormalną w ℜ3. Tutaj mamy na przykład podstawy:
B1 = ;; ;
B2 = ;; ;
Można wykazać, że podstawy te są ortonormalne, ponieważ pamiętamy to warunki, które należy spełnić:
Może ci służyć: pofalowana optyka-Wektory, które tworzą podstawę, muszą być dla siebie ortogonalne.
-Każdy z nich musi być jednolity.
Możemy to zweryfikować, wiedząc, że utworzone przez nich wyznacznik musi być nie -zerowy i równy 1.
Baza b1 Jest to dokładnie takie cylindryczne współrzędne ρ, φ i z, inny sposób wyrażania wektorów w przestrzeni.
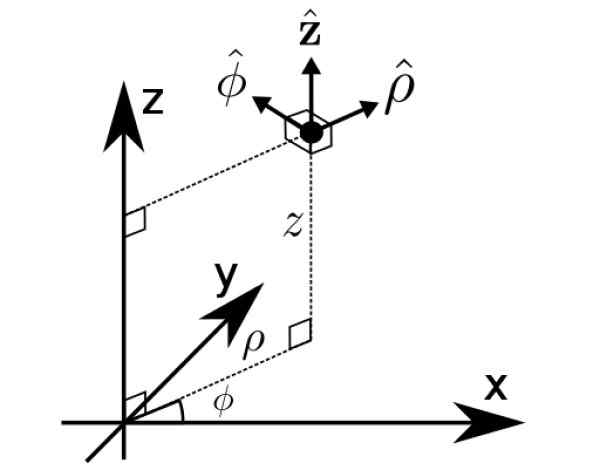 Rysunek 2. Współrzędne cylindryczne. Źródło: Wikimedia Commons. Math Buff [CC BY-S (https: // creativeCommons.Org/licencje/nabrzeże/4.0)].
Rysunek 2. Współrzędne cylindryczne. Źródło: Wikimedia Commons. Math Buff [CC BY-S (https: // creativeCommons.Org/licencje/nabrzeże/4.0)]. Rozwiązane ćwiczenia
- Ćwiczenie 1
Pokaż, że podstawa b = ; ; jest ortonormal.
Rozwiązanie
Aby pokazać, że wektory są prostopadłe do siebie, użyjemy produktu skalarnego, zwanego także punktem wewnętrznym lub produktu dwóch wektorów.
Niech dowolne dwa wektory Lub I v, Twój produkt skalarny jest zdefiniowany przez:
Lub • • v = Lub.v. cosθ
Aby odróżnić wektory od ich modułów. θ jest kątem pomiędzy Lub I v, Dlatego jeśli są prostopadłe, oznacza to, że θ = 90º i produkt skalarny jest nieważny.
Alternatywnie, jeśli wektory są podawane w kategoriach ich komponentów: Lub =
Lub • • v = LubX .vX + LubI .vI + Lubz .vz
W ten sposób produkty skalarne między każdą parą wektorów są odpowiednio:
i) • = (3/5).(-4/5) + (4/5).((3/5) + 0.0 = (-12/25) + (12/25) = 0
Ii) • = 0
iii) • = 0
Dla drugiego warunku obliczany jest moduł każdego wektora, który jest uzyskiwany przez:
│u │ = √ (uX2 + LubI2 + Lubz2)
Zatem moduły każdego wektora to:
│ = √ [(3/5)2 + (4/5)2 + 02)] = √ [(9/25) + (16/25)] = √ (25/25) = 1
│ = √ [(-4/5)2 + (3/5)2 + 02)] = √ [(16/25) + (9/25)] = √ (25/25) = 1
Może ci służyć: Druga równowaga Warunek: wyjaśnienie, przykłady, ćwiczenia│ = √ [02 + 02 + 12)] = 1
Dlatego trzy to wektory jednostkowe. Wreszcie, wyznacznik, który tworzą, nie jest zerowy i równy 1:

- Ćwiczenie 2
Napisz współrzędne wektorowe W = Pod względem poprzedniej bazy.
Rozwiązanie
Aby to zrobić, stosuje się następujące twierdzenie:
Niech B = v1, v2, v3,.. vN Baza ortonormalna w przestrzeni V z produktem krajowym, wektor W Jest reprezentowany przez B w następujący sposób:
W = <W• •v1> v1 + <W• •v2> v2 +<W• •v3> v3 +.. <W• •vN> vN
Oznacza to, że możemy napisać wektor u podstawy B, przez współczynniki <W• •v1>, <W• •v2>, .. <W• •vN>, dla których musisz obliczyć wskazane skalary:
• = (2).(3/5) + (3).(4/5) + 1.0 = (6/5) + (12/5) = 18/5
• = (2).(-4/5) + (3).(3/5) + 1.0 = (-8/5) + (9/5) = 1/5
• = 1
Z uzyskanymi produktami skalarnymi zbudowana jest matryca, nazywana Matryca współrzędna w.
Dlatego współrzędne wektora W W bazie B są wyrażane przez:
[[[W]B= [[[(18/5); (1/5); 1]
Matryca współrzędnych nie jest wektorem, ponieważ wektor nie jest taki sam, jak jego współrzędne. Są to tylko zestaw liczb, które służą do wyrażania wektora u danej podstawy, a nie wektor jako taki. Zależą również od wybranej bazy.
Wreszcie, po twierdzeniu, wektor W zostałby wyrażony w następujący sposób:
W = (18/5) v1 + (1/5) v2 + v3
Z: v1 =; v2 =; v3 =, To znaczy wektory podstawowe B.
Bibliografia
- Larson, r. Podstawy algebry liniowej. 6th. Wydanie. Cengage Learning.
- Larson, r. 2006. Obliczenie. 7th. Wydanie. Głośność 2. McGraw Hill.
- Salas, J. algebra liniowa. Temat 10. Bazy ortonormalne. Odzyskane z: OCW.UC3M.Jest.
- Uniwersytet Sevilla. Współrzędne cylindryczne. Baza wektorowa. Odzyskany z: Laplace.nas.Jest.
- Wikipedia. Baza ortonormalna. Odzyskane z: jest.Wikipedia.org.
- « Przygotowania reakcji fehling, czynne czynniki, przykłady, zastosowania
- Drugie zastosowania, eksperymenty i ćwiczenia Newtona »