

Formuły i równania antideriwalne, przykłady, ćwiczenia

- 3240
- 905
- Marianna Czarnecki
A Antiderivative F (x) funkcji F(x) jest również nazywane prymitywnymi lub po prostu nieokreślonymi całką wspomnianej funkcji, jeśli w danym przedziale Siema, To prawda, że F '(x) = f (x)
Na przykład weźmy następującą funkcję:
f (x) = 4x3
Antiderivative z tej funkcji to f (x) = x4, ponieważ uzyskując F (x) przez zasadę wyprowadzania dla mocy:

Jest uzyskiwany dokładnie f (x) = 4x3.
Jest to jednak tylko jeden z wielu antyiderivative F (x), ponieważ ta inna funkcja: g (x) = x4 + 2 Jest to również, ponieważ wyprowadzając g (x) w odniesieniu do x, jest to samo uzyskiwane z powrotem f (x).
Sprawdźmy to:
=4x^3)
Pamiętaj, że ten pochodzący ze stałej to 0. Dlatego do terminu x4 Możesz dodać dowolną stałą, a jej pochodna będzie nadal 4x3.
Stwierdzono, że każda funkcja formularza ogólnego F (x) = x4 + C, gdzie C jest prawdziwą stałą, służy jako antykiwatywna F (x).
Poprzedni przykład ilustracyjny można wyrazić w następujący sposób:
df (x) = 4x3 Dx
Niezdefiniowana antideriwacyjna lub całka jest wyrażana z symbolem ∫, dlatego:
F (x) = ∫4x3 dx = x4 + C
Gdzie funkcja f (x) = 4x3 Nazywa się integracja, a C jest Stała integracji.
[TOC]
Przykłady antiderivative
Rysunek 1. Anti -Hotley jest niczym więcej niż nieokreśloną całką. Źródło: Pixabay. Znalezienie antiderizacji funkcji jest proste w niektórych przypadkach, w których pochodne są dobrze znane. Na przykład, bądź funkcją f (x) = Sen x, ujednolicony dla niej jest inna funkcja f (x), tak że po uzyskaniu jej uzyskiwania jest f (x).
Ta funkcja może być:
F (x) = - cos x
Sprawdźmy, że to prawda:
F '(x) = (- cos x)' =- (-sen x) = sin x
Dlatego możemy napisać:
∫Sen x dx = -cos x + c
Oprócz znajomości pochodnych, istnieją podstawowe i proste zasady integracji, aby znaleźć nieokreślone antyekrologiczne lub integralne.
Może ci służyć: kolejne pochodneBądź prawdziwą stałą, zatem:
1.- ∫kdx = k ∫dx = kx + c
2.- ∫kf (x) dx = k ∫f (x) dx
Jeśli funkcję H (x) można wyrazić jako sumę lub odejmowanie dwóch funkcji, wówczas jej nieokreślona całka jest:
3.- ∫h (x) dx = ∫ [f (x) ± g (x)] dx = ∫f (x) dx ± ∫g (x) dx
To jest właściwość liniowości.
Reguła mocy W przypadku całek można go ustalić w ten sposób:

W przypadku n = -1 stosowana jest następująca reguła:
5.- ∫X -1 Dx = ln x +c
Łatwo jest wykazać, że pochodna Ln x to jest dokładnie X -1.
Równania różniczkowe
Równanie różniczkowe to takie, w którym nieznana jest pochodna.
Teraz, z poprzedniej analizy, łatwo jest zdać sobie sprawę, że odwrotną działaniem pochodnej jest nieokreślona antyekrologiczna lub integralna.
Niech f (x) = y '(x), to znaczy pochodzący z określonej funkcji. Możemy użyć następującej notacji, aby wskazać tę pochodną:
=y'(x)=\fracdydx)
Natychmiast następuje:
dy = f (x) dx
Nieznanym z równania różniczkowego jest funkcja y (x), ta, której pochodną jest f (x). Aby to wyczyścić, poprzednie wyrażenie jest zintegrowane po obu stronach, co jest równoważne z zastosowaniem antiderityzacji:
∫DY = ∫f (x) dx
Lewa całka jest rozwiązywana na podstawie reguły integracji 1, z k = 1, a zatem poszukiwany -awaite jest wyczyszczony:
i (x) = ∫f (x) dx = f (x) + c
A ponieważ C jest prawdziwą stałą, aby wiedzieć, co jest odpowiednie w każdym przypadku, instrukcja musi zawierać wystarczające dodatkowe informacje, aby obliczyć wartość C. To się nazywa Stan początkowy.
W następnej sekcji zobaczymy przykłady zastosowania tego wszystkiego.
Może ci służyć: punktualne oszacowanieĆwiczenia zhortowane
- Ćwiczenie 1
Zastosuj reguły integracji, aby uzyskać następujące nieokreślone antyeksywacje lub całki podanych funkcji, upraszczając wyniki w jak największym stopniu. Wygodne jest zweryfikowanie wyniku przez wyprowadzenie.
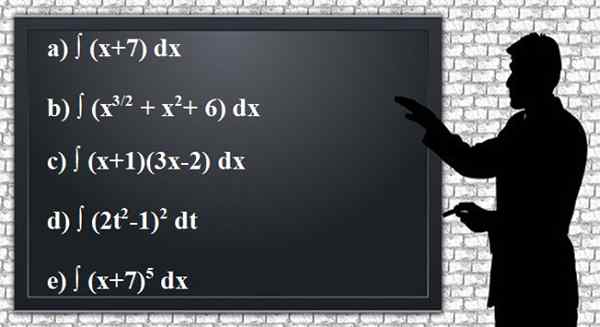 Rysunek 2. Zdefiniowane ćwiczenia przednio lub integralne. Źródło: Pixabay.
Rysunek 2. Zdefiniowane ćwiczenia przednio lub integralne. Źródło: Pixabay. Rozwiązanie
Najpierw stosujemy zasadę 3, ponieważ integracja jest sumą dwóch terminów:
∫ (x +7) dx = ∫ xdx +∫7dx
Dla pierwszej całki stosuje się zasadę mocy:
∫ xdx = (x2 /2)+C1
W drugiej regule integralnej 1 obowiązuje, wynosząc K = 7:
∫7dx = 7∫dx = 7x + c2
A teraz wyniki są dodawane. Dwa stałe są pogrupowane w jedną, ogólnie zwaną C:
∫ (x+7) dx = (x2 /2) + 7x + c
Rozwiązanie b
Przez liniowość ta integralna rozkłada się na trzy prostsze całki, do których zastosowano zasadę mocy:
∫ (x3/2 + X2 + 6) dx = ∫x3/2 DX + ∫X2 dx +∫6 dx =

Zauważ, że dla każdej całki pojawia się stała integracji, ale spotykają się w jednym połączeniu C.
Rozwiązanie c
W takim przypadku wygodne jest zastosowanie właściwości dystrybucyjnej mnożenia w celu opracowania integracji. Następnie używasz zasady uprawnień, aby znaleźć każdą całkę osobno, jak w poprzednim roku.
∫ (x+1) (3x-2) dx = ∫ (3x2-2x+3x-2) dx = ∫ (3x2 + X - 2) dx
Uważny czytelnik zaobserwuje, że dwa centralne terminy są podobne, dlatego są one zmniejszone przed zintegrowaniem:
∫ (x+1) (3x-2) dx = ∫3x2 dx + ∫ x dx + ∫- 2 dx = x3 + (1/2) x2 - 2x + c
Rozwiązanie e
Sposobem na rozwiązanie całki byłoby rozwój władzy, jak to miało miejsce w przykładzie D. Jednak ponieważ wykładnik jest wyższy, konieczne byłoby dokonanie zmiennej zmiany, aby nie musiał dokonać tak długiego rozwoju.
Może ci służyć: ciągła losowa zmiennaZmiana zmienna jest następująca:
U = x + 7
Po obu stronach to wyrażenie:
du = dx
Integral jest przekształcany w prostszą z nową zmienną, która jest rozwiązywana z zasadą mocy:
∫ (x+7)5 Dx = ∫ u5 du = (1/6) u6 + C
Wreszcie zmiana jest zwracana, aby powrócić do oryginalnej zmiennej:
∫ (x+7)5 Dx = (1/6) (x+7)6 + C
- Ćwiczenie 2
Cząstka jest początkowo spoczynkowa i porusza się wzdłuż osi x. Jego przyspieszenie dla t> 0 jest podane przez funkcję a (t) = cos t. Wiadomo, że przy t = 0 pozycja to x = 3, wszystkie w jednostkach systemu międzynarodowego. Poproszono o znalezienie prędkości v (t) i położenia x (t) cząstki.
Rozwiązanie
Ponieważ przyspieszenie jest pierwszym pochodzącym z prędkości w odniesieniu do czasu, masz następujące równanie różniczkowe:
a (t) = v '(t) = cos t
Wynika, że:
v (t) = ∫ cos t dt = sin t + c1
Z drugiej strony wiemy, że prędkość jest z kolei pochodną pozycji, dlatego ponownie integrujemy się:
x (t) = ∫ v (t) dt = ∫ (sin t + c1) dt = ∫Sen t dt + ∫c1 dt = - cos t + c1 T + c2
Stałe integracyjne są określone na podstawie informacji podanych w oświadczeniu. Po pierwsze, mówi, że cząstka była początkowo w spoczynku, dlatego v (0) = 0:
V (0) = sin 0 + c1 = 0
C1 = 0
Wtedy musisz x (0) = 3:
x (0) = - cos 0 + c1 0 + c2 = - 1 + C2 = 3 → C2 = 3+1 = 4
Funkcje prędkości i pozycji są zdecydowanie takie:
v (t) = sen t
x (t) = - cos t + 4
Bibliografia
- Engler, a. 2019. Rachunek integralny. National University of the Coast.
- Larson, r. 2010. Obliczanie zmiennej. 9na. Wydanie. McGraw Hill.
- Darmowe teksty matematyki. Antiderivative. Odzyskane z: matematyki.Liibretexts.org.
- Wikipedia. Antiderivative. Źródło: w:.Wikipedia.org.
- Wikipedia. Integracja nieokreślona. Odzyskane z: jest.Wikipedia.org.
- « 13 rodzajów wartości i ich znaczenie (z przykładami)
- Wzór i równania potencjału elektrycznego, obliczenia, przykłady, ćwiczenia »