

Charakterystyka i właściwości wektora, elementy, typy, przykłady
- 1285
- 44
- Estera Wojtkowiak
wektory Są to istoty matematyczne, które mają pozytywną wielkość -zwykle towarzyszy jednostce miary, oprócz kierunku i znaczenia. Takie cechy są bardzo odpowiednie do opisania wielkości fizycznych, takich jak prędkość, siła, przyspieszenie i wiele innych.
Wektorów możliwe jest wykonywanie operacji, takich jak suma, odejmowanie i produkty. Podział nie jest zdefiniowany dla wektorów, a podobnie jak dla produktu, istnieją trzy klasy, które opiszemy później: produkt skalarny lub punktowy, wektor lub krzyżowy produkt i produkt skalarny dla wektora.
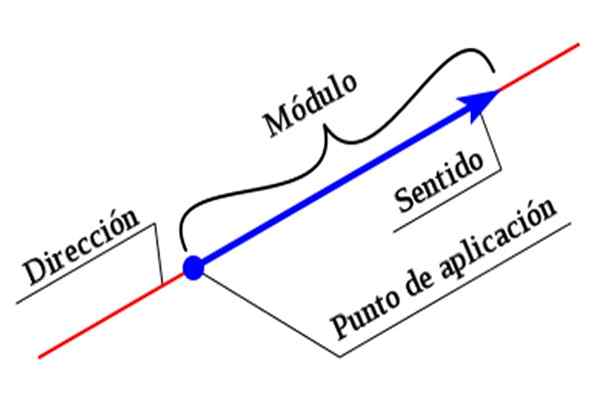 Rysunek 1. Elementy wektora. Źródło: Wikimedia Commons.
Rysunek 1. Elementy wektora. Źródło: Wikimedia Commons. Aby całkowicie opisać wektor, konieczne jest wskazanie wszystkich jego właściwości. Wielkość lub moduł jest wartością liczbową, któremu towarzyszy jednostka, podczas gdy kierunek i znaczenie są ustalane za pomocą układu współrzędnych.
Spójrzmy na przykład: załóżmy, że samolot leci z jednego miasta do drugiego w tempie 850 km/h w kierunku. Tutaj mamy całkowicie określony wektor, ponieważ dostępna jest wielkość: 850 km/h, podczas gdy kierunek i znaczenie są NE.
Wektory są zwykle reprezentowane graficznie przez zorientowane segmenty linii, których długość jest proporcjonalna do wielkości.
Aby określić kierunek i znaczenie, wymagana jest linia odniesienia, która zwykle jest osą poziomą, chociaż Północ może być również traktowana jako odniesienie, taka jest taka prędkość płaszczyzny:
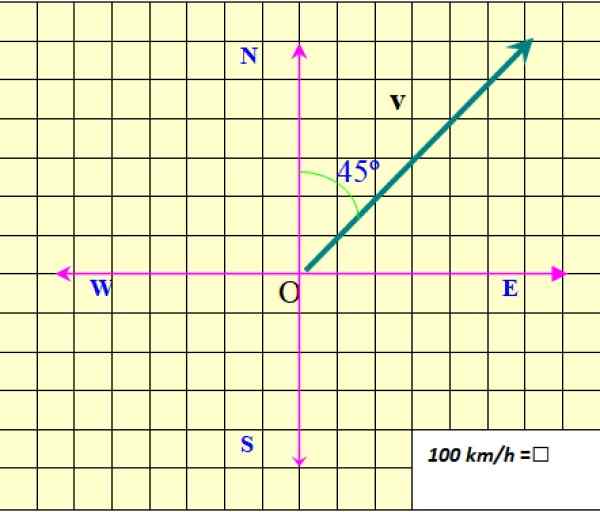 Rysunek 2. Wektor prędkości. Źródło: f. Zapata.
Rysunek 2. Wektor prędkości. Źródło: f. Zapata. Rysunek pokazuje wektor prędkości płaszczyzny, który jest oznaczony jako v W pogrubiony, Aby odróżnić go od wielkości skalarnej, która wymaga tylko wartości numerycznej i określonej jednostki.
[TOC]
Elementy wektora
Jak powiedzieliśmy, elementy wektorowe to:
-Wielkość lub moduł, czasami nazywany również wartością bezwzględną lub standardem wektora.
-Adres
-Sens
W przykładzie na rycinie 2 moduł v To 850 km/h. Moduł jest oznaczony jako V bez pogrubionego lub jako |v|, Gdzie słupki reprezentują wartość bezwzględną.
Adres v jest określony w odniesieniu do północy. W tym przypadku jest 45º na północ od wschodu (45º NE). Wreszcie wierzchołek strzałki informuje o kierunku v.
W tym przykładzie pochodzenie wektorowe zostało narysowane przez zbieżność z systemem pochodzenia lub współrzędnych, jest to znane jako Połączony wektor. Z drugiej strony, jeśli pochodzenie wektora nie pasuje do pochodzenia systemu odniesienia, mówi się, że jest to wolny wektor.
Należy zauważyć, że aby całkowicie określić wektor, te trzy elementy należy wskazać, w przeciwnym razie opis wektora byłby niekompletny.
Prostokątne składniki wektora
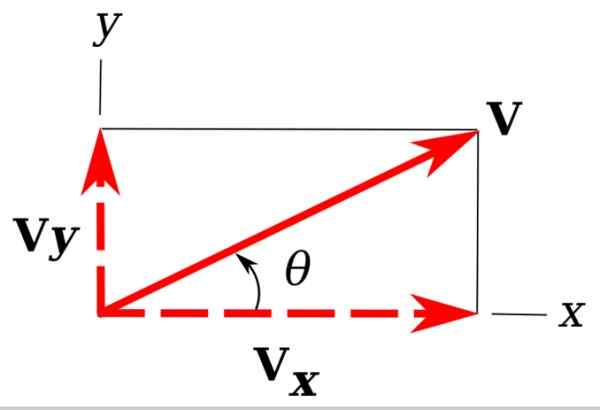 Rysunek 3. Prostokątne składniki wektora w płaszczyźnie. Źródło: Wikimedia Commons. Untuer [CC BY-SA 3.0 (https: // creativeCommons.Org/licencje/by-sa/3.0)]
Rysunek 3. Prostokątne składniki wektora w płaszczyźnie. Źródło: Wikimedia Commons. Untuer [CC BY-SA 3.0 (https: // creativeCommons.Org/licencje/by-sa/3.0)] Na obrazie mamy nasz przykład wektor v, to jest w samolocie Xy.
Łatwo zauważyć, że projekcje V na osiach współrzędnych x i y określają prawy trójkąt. Te projekcje są vI I vX i nazywane są prostokątnymi elementami v.
Sposób na oznaczenie v Poprzez prostokątne komponenty jest takie: v =
Jeśli wektor znajduje się w przestrzeni trójwymiarowej, potrzebny jest jeszcze jeden składnik, tak::
v =
Znając prostokątne składniki, obliczana jest wielkość wektora, równoważna znalezieniu hipotenu prawego trójkąta, którego nogi są vX I vI,. Poprzez twierdzenie Pitagorasa następuje, że:
|v|2 = (vX)2 + (vI)2
Polarna forma wektora
Gdy znana jest wielkość wektora |v| I kąt θ, że ta forma z osą odniesienia, zwykle osi pozioma, wektor jest równo określony. Następnie mówi się, że wektor jest wyrażany w postaci polarnej.
W tym przypadku łatwo obliczane są prostokątne komponenty:
vX = |v|.cos θ
vI = |v|.sin θ
Zgodnie z powyższym, prostokątne elementy wektora prędkości v samolotu byłoby:
vX = 850 . cos 45º km/h = 601.04 km/h
vI = 850 . Sen 45º km/h = 601.04 km/h
Chłopaki
Istnieją różne rodzaje wektorów. Istnieją wektory żyłowe, pozycja, przemieszczenie, siła, pole elektryczne, ilość ruchu i wiele innych. Jak już powiedzieliśmy, w fizyce jest wiele wielkości wektorów.
Jeśli chodzi o wektory, które mają pewne cechy, możemy wspomnieć o następujących typach wektorów:
-Zero: Są to wektory, których wielkość wynosi 0 i które są oznaczone jako 0. Pamiętaj, że odważna litera symbolizuje trzy podstawowe cechy wektora, podczas gdy normalna litera reprezentuje tylko moduł.
Na przykład o ciele w równowadze statycznej suma sił musi być wektorem zerowym.
-Darmowe i powiązane: Wolne wektory to te, których punktami pochodzenia i przybycia są dowolną parą punktów płaszczyzny lub przestrzeni, w przeciwieństwie do połączonych wektorów, których pochodzenie pokrywa się z punktem systemu referencyjnego używanego do ich opisania.
Para lub moment wyprodukowany przez kilka sił jest dobrym przykładem wolnego wektora, ponieważ moment obrotowy nie ma zastosowania do jakiegoś konkretnego punktu.
-Sprzęt: Są dwoma wolnymi wektorami, które mają identyczne cechy. Dlatego mają tę samą wielkość, kierunek i znaczenie.
-Coplanares lub coplanarios: wektory należące do tej samej płaszczyzny.
-Przeciwieństwa: wektory o równej wielkości i kierunku, ale przeciwne zmysły. Wektor przeciwny wektora v Jest to wektor -v A suma obu to wektor zerowy: v + (-v) = 0.
-Równoległy: wektory, których linie działania przechodzą przez ten sam punkt.
-Slajd: to wektory, których punkt aplikacji mogą przesunąć się wzdłuż określonej linii.
-Colineal: wektory znajdujące się na tej samej linii.
-Unitary: Te wektory, których moduł to 1.
Wektory jednostki ortogonalnej
Istnieje bardzo przydatny rodzaj wektora w fizyce zwanej wektorem jednostki ortogonalnej. Wektor jednostki ortogonalnej ma moduł równy 1, a jednostki mogą być dowolne, na przykład prędkość, pozycja, wytrzymałość lub inna.
Istnieje zestaw specjalnych wektorów, które pomagają łatwo reprezentować inne wektory i wykonywać z nimi operacje: są to wektory ortogonalne Siema, J I k, Unitary i prostopadle do siebie.
W dwóch wymiarach wektory te są skierowane w pozytywnym sensie obu osi X według osi I. A w trzech wymiarach dodaje się wektor jednostkowy w kierunku osi z pozytywny. Są reprezentowane w następujący sposób:
Może ci służyć: jaka jest struktura badań dokumentalnych?Siema =
J =
k =
Wektor może być reprezentowany przez wektory jednostkowe Siema, J I k następująco:
v = vX Siema + vI J + vz k
Na przykład wektor prędkości v Z poprzednich przykładów możesz napisać jako:
v = 601.04 Siema + 601.04 J km/h
Komponent w k Nie jest to konieczne, ponieważ ten wektor jest w płaszczyźnie.
Suma wektorów
Suma wektorów pojawia się bardzo często w różnych sytuacjach, na przykład, gdy chcesz znaleźć wynikową siłę na obiekcie, na który wpływa różne siły. Aby zacząć, przypuśćcie, że masz dwa bezpłatne wektory Lub I v w samolocie, jak następujące pokazują po lewej:
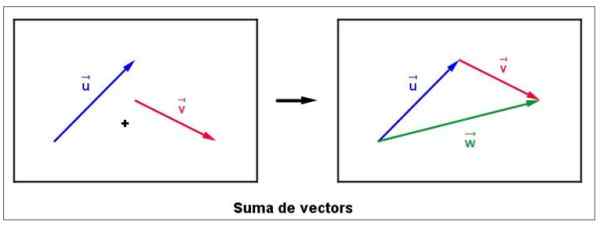 Rysunek 4. Suma graficzna dwóch wektorów. Źródło: Wikimedia Commons. LLUC CABANACH [CC BY-SA 3.0 (https: // creativeCommons.Org/licencje/by-sa/3.0)].
Rysunek 4. Suma graficzna dwóch wektorów. Źródło: Wikimedia Commons. LLUC CABANACH [CC BY-SA 3.0 (https: // creativeCommons.Org/licencje/by-sa/3.0)]. Natychmiast przenosi się do wektora v, bez modyfikowania jego wielkości, kierunku lub znaczenia, tak aby powstało z końcem Lub.
Wektor sumowy jest nazywany W i jest narysowany, zaczynając od ukończenia v, Zgodnie z prawą figurą. Należy zauważyć, że wielkość wektora W Niekoniecznie jest to suma wielkości v I Lub.
Jeśli jest to starannie odzwierciedlone w tym względzie, jedyną okazją, gdy wielkość powstałego wektora jest suma wielkości dodanych, to wtedy, gdy obaj uzależnieni są w tym samym kierunku i mają to samo znaczenie.
I co się stanie, jeśli wektory nie są wolne? Bardzo łatwo je dodać. Sposobem jest dodanie komponentu komponentu lub metody analitycznej.
Jako przykład, rozważmy wektory poniższej liczby, pierwszą rzeczą jest wyrażanie ich z jednej z wcześniej wyjaśnionych formantów:
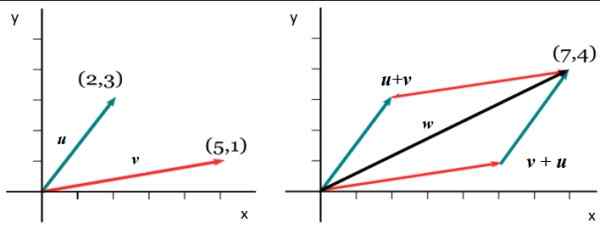 Rysunek 5. Suma dwóch połączonych wektorów. Źródło: Wikimedia Commons.
Rysunek 5. Suma dwóch połączonych wektorów. Źródło: Wikimedia Commons. v =
Lub =
Aby uzyskać komponent w X wektora dodaje W, Odpowiednie komponenty są dodawane X z v I Lub: WX = 5+2 = 7. I zdobyć WI Przestrzegana jest analogiczna procedura: wI = 1+3. Dlatego:
Lub =
Właściwości suma wektorów
-Suma dwóch lub więcej wektorów powoduje inny wektor.
-Jest ono zgodne, kolejność dodatków nie zmienia sumy, aby:
Lub + v = v + Lub
-Neutralnym elementem sumy wektorów jest wektor zerowy: v + 0 = v
-Odejmowanie dwóch wektorów jest zdefiniowane jako suma przeciwnego: V - u = v + (-Lub)
Przykłady wektorów
Jak powiedzieliśmy, w fizyce istnieje wiele ilości wektorów. Wśród najbardziej znanych są:
-Pozycja
-Przemieszczenie
-Średnia prędkość i natychmiastowa prędkość
-Przyśpieszenie
-Siła
-Ilość ruchu
-Moment obrotowy lub moment siły
-Impuls
-pole elektryczne
-Pole magnetyczne
-Moment magnetyczny
Z drugiej strony nie są wektorami, ale wspinają się:
-Czas
-Masa
-Temperatura
-Tom
-Gęstość
-Praca mechaniczna
-Energia
-Ciepło
-Moc
-Napięcie
-Prąd elektryczny
Inne operacje między wektorami
Oprócz sumy i odejmowania wektorów istnieją trzy inne operacje między bardzo ważnymi wektorami, ponieważ powodują one nowe, bardzo ważne wielkości fizyczne:
-Produkt skalarny dla wektora.
-Produkt skalarny lub produkt punktowy między wektorami
-Oraz produkt krzyżowy lub wektorowy między dwoma wektorami.
Produkt skalarny dla wektora
Rozważ drugie prawo Newtona, które stwierdza, że ta siła F i przyspieszenie Do Są proporcjonalne. Stała proporcjonalności jest masa M obiektu, zatem:
F = m.Do
Ciasto to skalar; Ze swojej strony siła i przyspieszenie to wektory. Ponieważ siła uzyskuje się przez pomnożenie masy przez przyspieszenie, jest wynikiem produktu skalarnego przez wektor.
Może ci służyć: przykłady ram teoretycznychTen rodzaj produktu zawsze powoduje wektor. Tutaj kolejny przykład: ilość ruchu. Być P Wektorowa ilość ruchu, v Wektor prędkości i jak zawsze, M to masa:
P = m.v
Produkt skalarny lub produkt punktowy między wektorami
Umieściliśmy prace mechaniczne na liście wielkości, które nie są wektorami. Jednak praca w fizyce jest wynikiem operacji między wektorami zwanymi produktem skalarnym, produktem wewnętrznym lub produktem punktowym.
Być wektorami v I Lub, Punkt lub produkt wspinaczkowy jest między nimi zdefiniowany:
v∙Lub = |v|. ∙ |Lub |.cos θ
Będąc θ kątem między nimi. Z pokazanego równania natychmiast wydedukowano, że wynikiem punktu produktu jest skalar, a także jeśli oba wektory są prostopadłe, ich produkt skalarny wynosi 0.
Powrót do pracy mechanicznej W, To jest produkt skalarny między wektorem wytrzymałościowym F i przemieszczenie wektora ℓ.
W = F∙ℓ
Gdy wektory są dostępne pod względem ich komponentów, produkt punktowy jest również bardzo prosty do obliczenia. Tak v =
v∙Lub = vX LubX + vI LubI + vz Lubz
Produkt punktowy między wektorami jest zatem do pracy, zatem:
v∙Lub = Lub∙v
Produkt krzyżowy lub produkt wektorowy między wektorami
Tak v a u są naszymi dwoma przykładowymi wektorami, produkt wektorowy jest zdefiniowany jako:
v X Lub = W
Natychmiast wynika z tego, że produkt krzyżowy powoduje wektor, którego moduł jest zdefiniowany jako:
|v X u | = | V | . | U |. sin θ
Gdzie θ Jest to kąt między wektorami.
Dlatego produkt krzyżowy nie jest przedmiotem pracy v X u ≠ u X v. W rzeczywistości v X U = - (u X V).
Jeśli dwa przykładowe wektory są wyrażone w kategoriach wektorów jednostkowych, ułatwia się obliczenie produktu wektorowego:
v = vX Siema + vI J + vz k
Lub = uX Siema + LubI J + Lubz k
Produkty między wektorami jednostkowymi
Produkt krzyżowy między identycznymi wektorami jednostkowymi jest zerowy, ponieważ kąt między nimi wynosi 0º. Ale wśród różnych wektorów jednostkowych kąt między nimi wynosi 90º i Sin 90º = 1.
Poniższy schemat pomaga znaleźć te produkty. W kierunku strzałki ma to pozytywny sens i w przeciwnym kierunku:
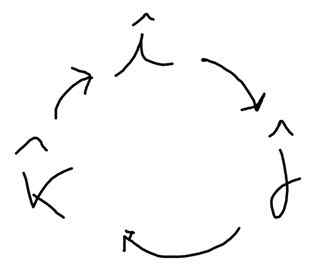
Siema X J = K, J X k = Siema; k X Siema = J; J X i = -k; k X J = -Siema; Siema X k = -J
Stosując nieruchomość dystrybucyjną, która pozostaje ważna dla produktów wśród wektorów oraz właściwości wektorów jednostkowych, masz:
v X Lub = (vX Siema + vI J + vz k) X (uX Siema + LubI J + Lubz k) =
= (vILubz - vzLubI )Siema + (vzLubX - vXLubz )J + (vXLubI - vILubX )k
Rozwiązane ćwiczenia
- Ćwiczenie 1
Biorąc pod uwagę wektory:
v = -5 Siema + 4J + 1 k
Lub = 2 Siema -3 J + 7k
Co powinno być wektor W tak suma v + Lub + W wyniki 6 Siema +8 J -10k?
Rozwiązanie
-5 Siema + 4J + 1 k
2 Siema -3 J + 7k
WX Siema + WI J + Wz k +
--
6Siema + 8 J -10 k
Dlatego należy spełnić, że:
-5 +2 + wX = 6 → WX = 9
4-3 + wI = 8 → WI = 7
1 + 7 + wz = -10 → wz = -18
Odpowiedź to: W = 9 Siema +7 J - 18k
- Ćwiczenie 2
Jaki jest kąt między wektorami v I Lub ćwiczenia 1?
Rozwiązanie
Użyjemy produktu skalarnego. Mamy:
cos θ = v∙Lub / |v|. ∙ |Lub|
v∙Lub= -10 -12+7 = -15
|v| = √ (-5)2 +42 +12= √42 = 6.48
|Lub| = √22 +(-3)2 +72= √62 = 7.87
Zastąpienie tych wartości:
cos θ = -15 / 6.48 x 7.87 = -0.2941 → θ = 107.1st
Bibliografia
- Figueroa, zm. (2005). Seria: Fizyka nauk i inżynierii. Tom 1. Kinematyka. Pod redakcją Douglas Figueroa (USB).
- Giancoli, zm. 2006. Fizyka: zasady z aplikacjami. 6th. Ed Prentice Hall.
- Rex, a. 2011. Podstawy fizyki. osoba.
- Sears, Zemansky. 2016. Fizyka uniwersytecka z nowoczesną fizyką. 14. Wyd. Tom 1.
- Serway, r., Jewett, J. 2008. Fizyka nauk i inżynierii. Tom 1. 7th. Wyd. Cengage Learning.