

Suma wektorów metoda graficzna, przykłady, rozwiązane ćwiczenia
- 628
- 75
- Eliasz Dubiel
suma wektorów Jest to operacja dodawania między wektorami, która powoduje inny wektor. Wektory charakteryzują się wielkością, a także kierunkiem i znaczeniem. Dlatego ogólnie nie jest możliwe dodawanie ich tak, jak zrobiłoby to z wielkościami skalarnymi, to znaczy dodawaniem liczb.
Wektor uzyskany z sumy kilku wektorów jest nazywany wynikowy wektor. W mechanice rozmawiamy o wynikowa siła, która jest sumą wektorową wszystkich sił na ciele. Ten wynik jest równoważny z zestawem lub systemem sił.
Aby całkowicie określić wektor sumy, konieczne jest wskazanie wielkości i jedności, kierunku i znaczenia.
Ważne jest, aby podkreślić, że dodając wektory, muszą one reprezentować tę samą wielkość fizyczną, dlatego suma wektora jest jednorodną operacją. Oznacza to, że możemy dodać jedną siłę z drugą, ale nie siłą z przemieszczeniem, ponieważ wynik jest bez znaczenia.
Dostępnych jest kilka metod, aby znaleźć wynikowy wektor: grafika i analizy. Aby znaleźć sumy wektorowe za pomocą metod graficznych, opiera się on na prostej reprezentacji wektora, a mianowicie zorientowanej na segment lub strzałkę:
 Graficzna reprezentacja wektora w płaszczyźnie. Źródło: f. Zapata.
Graficzna reprezentacja wektora w płaszczyźnie. Źródło: f. Zapata. Wektory są oznaczone czarnymi literami w drukowanym tekście lub strzałką nad literą, aby odróżnić je od odpowiednich wielkości lub wielkości skalarnych. Na przykład wielkość wektora v To jest po prostu v.
[TOC]
Metoda graficzna do dodawania wektorów
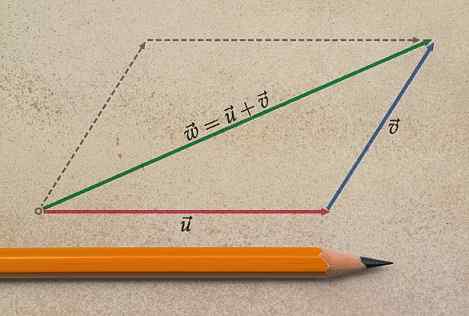
Aby dodać więcej niż dwa wektory kupletów, Metoda wielokąta albo wielokąt, który polega na przeniesieniu się do każdego z adresowanych wektorów. Cechą wektorów jest to, że są one niezmienne w odniesieniu do tłumaczenia, dlatego użyjemy tej właściwości do ustalenia sumy.
Może ci służyć: rozszerzenie termiczneZaczyna się od dowolnego z wektorów, ponieważ dodatek wektorowy jest komutowany, a kolejność dodatków nie zmienia sum. Drugi wektor porusza się poniżej, dopasowując swoje pochodzenie do końca pierwszego.
Następnie zostaje wprowadzony do następnego wektora, a następnie umieszcza tę samą procedurę, która ma dopasować pochodzenie do końca poprzedniego. W ten sposób przystąpimy do pozycjonowania ostatniego wektora.
Powstały wektor to ten, który łączy pochodzenie pierwszego z wolnym końcem ostatniego. Nazwa tej metody pochodzi od liczby, która wynika: wielokąt.
Przykład
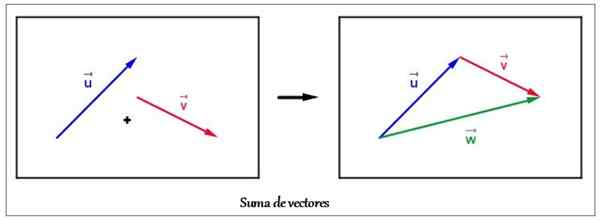
Sum przykład dwóch wektorów w płaszczyźnie metodą graficzną. Źródło: Wikimedia Commons Weźmy jako przykład sumę dwóch wektorów Lub I v to pokazane na górnej figurze.
Zaczynając od wektora Lub, Przeniósł się do wektora v Aby dopasować jego pochodzenie do końca pierwszego. Powstały wektor W Jest wyciągany z pochodzenia Lub do końca v, tworząc trójkąt trzypasowy: trójkąt. Dlatego w tym szczególnym przypadku wywoływana jest procedura Metoda trójkąta.
Zwróć uwagę na ważny szczegół, wielkość lub moduł powstałego wektora nie jest sumą modułów dodatkowych wektorów. W rzeczywistości jest prawie zawsze mniej, chyba że wektory są równoległe.
Zobaczmy poniżej, co się stanie w tym przypadku.
Specjalny przypadek: suma wektorów równoległych
Opisaną metodę można również zastosować do specjalnego przypadku, w którym wektory są równoległe. Rozważ następujący przykład:
Może ci służyć: Boltzmann stała: historia, równania, obliczenia, ćwiczenia Suma równoległych wektorów. Źródło: f. Zapata.
Suma równoległych wektorów. Źródło: f. Zapata. Wektor jest pozostawiony v W pierwotnej pozycji i przechodzi do wektora Lub w taki sposób, że jego pochodzenie zgadza się z końcem v. Teraz wektor jest wyciągany z pochodzenia v I koniec Lub.
Jest to wynikowy wektor W a jego rozmiar jest sumą rozmiarów reklam. Kierunek i kierunek trzech wektorów jest taki sam.
Powstały wektor ma maksymalny moduł, jeśli dodatki tworzą kąt 0º, na przykład z przykładu. Jeśli wektory tworzą ze sobą kąt 180º, wynikowy wektor ma minimalny moduł.
Przykłady sumy wektorów
- Przemieszczenia
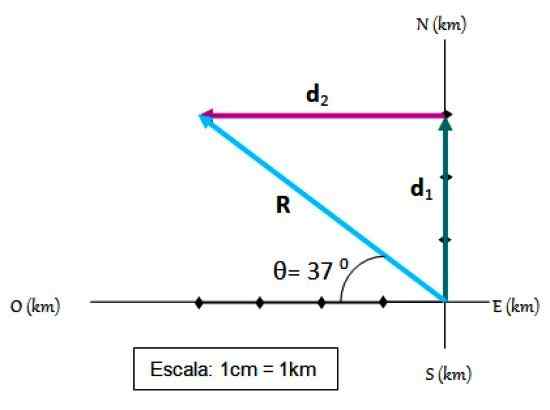
Rowerzysta podróżuje najpierw 3 km na północ, a następnie 4 km na zachód. Twoje przemieszczenie, które nazywamy R, Można go łatwo znaleźć za pomocą metody trójkąta plus system odniesienia, w którym oznaczone są punkty kardynalne:
 Wynikające z dwóch przemieszczeń. Źródło: f. Zapata.
Wynikające z dwóch przemieszczeń. Źródło: f. Zapata. Kroki, aby dodać wektor
-Punkt początkowy zbiega się z pochodzeniem systemu odniesienia.
-Na osie współrzędnych wybiera się skala, która w tym przypadku wynosi 1 cm = 1 km
-Pierwsze przemieszczenie jest rysowane na skalę D1.
-Następnie D1 Drugie przemieszczenie jest narysowane D2, Również na skalę.
-Powstałe przemieszczenie R Jest to wektor, który przechodzi od pochodzenia do końca D2.
-Rozmiar R Jest mierzony za pomocą reguły stopniowej, łatwo jest sprawdzić, czy r = 5.
-Wreszcie kąt to R Forma z poziomym jest mierzona za pomocą transportera i okazuje się, że θ = 37 0
- Wynikowa prędkość
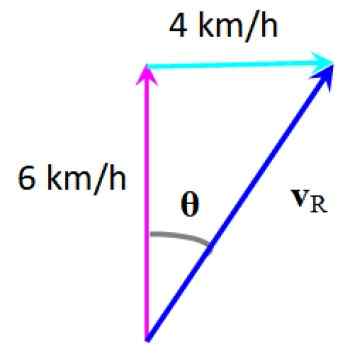
Pływak chce przekroczyć rzekę i za to nic z prędkością 6 km/h, prostopadłe do brzegu, ale prąd, który niesie prędkość 4 km/h.
Może ci służyć: Ohm: Mierniki oporowe, przykłady i ćwiczenia rozwiązaneAby poznać jego wynikową prędkość, dodawane są wektory prędkości pływaka, które zostały narysowane pionowo i prąd, który jest pozioma.
Zgodnie z metodą graficzną uzyskuje się wynikową prędkość vR:
 Wynikowa prędkość. Źródło: f. Zapata.
Wynikowa prędkość. Źródło: f. Zapata. Odchylenie doświadczane przez pływaka można obliczyć przez:
θ = ARCTG (4/6) = 33.7 po prawej stronie pierwszego adresu
Wielkość jego prędkości rośnie, ponieważ prędkość rzeki dodaje wektorowo. Możesz znaleźć ostrożnie skalę, jak w poprzednim przykładzie.
Lub za pomocą trygonometrycznych przyczyn 33.7:
Sen 33.7th = 4/vR
vR = 4/ sin 33.7. = 7.21 km/h
Ćwiczenie rozwiązane
Na cząsteczce następujące siły Ustawa, których wielkości wymieniono poniżej:
F1= 2.5 N; F2= 3 N; F3= 4 N; F4= 2.5 n
Znajdź wynikową siłę.
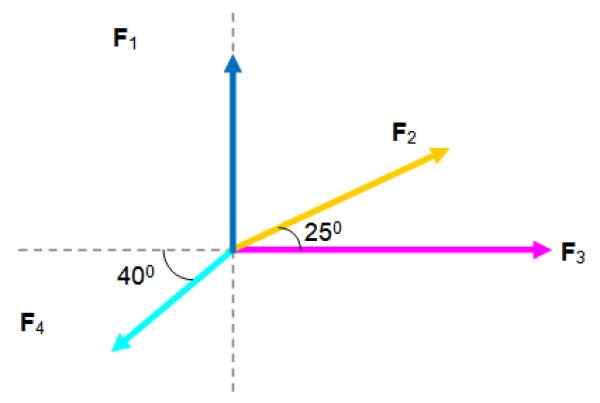 System sił Coplanar. Źródło: f. Zapata.
System sił Coplanar. Źródło: f. Zapata. Rozwiązanie
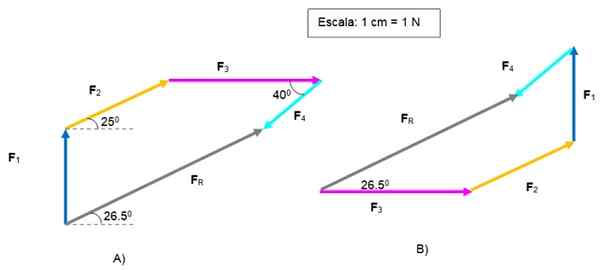
Możemy dodać graficznie zaczynając od dowolnego z wektorów, ponieważ suma wektora jest przemienna.
Na rysunku zaczęło się od F1. Ustanowienie skali i przy pomocy reguły i oddziału pozostałe wektory są przenoszone, aby umieścić je jeden po drugim.
Wektor FR jest skierowany z pochodzenia F1 do końca F4. Jego wielkość wynosi 5.2 N i tworzy kąt 26.5 w odniesieniu do poziomego.
 Wektorowa suma graficzna. Źródło: f. Zapata.
Wektorowa suma graficzna. Źródło: f. Zapata. Na rysunku B Ten sam problem został rozwiązany, zaczynając od F3 i kończąc z F4, Aby uzyskać to samo FR .
Wielokąty są różne, ale wynik jest taki sam. Czytelnik może ponownie przetestować kolejność wektorów.
Bibliografia
- Bauer, w. 2011. Fizyka inżynierii i nauki. Tom 1. MC Graw Hill.
- Bedford, 2000. DO. Mechanika inżynierii: statyczne. Addison Wesley.
- Figueroa, zm. (2005). Seria: Fizyka nauk i inżynierii. Tom 1. Kinematyka. Pod redakcją Douglas Figueroa (USB).
- Giambattista, a. 2010. Fizyka. 2. Wyd. McGraw Hill.
- Sears, Zemansky. 2016. Fizyka uniwersytecka z nowoczesną fizyką. 14. Wyd. Tom 1.
- « Przykłady metody metody równoległej, rozwiązane ćwiczenia
- 6 najważniejszych elementów bezpieczeństwa przemysłowego »