

Wielkość wektora
- 3731
- 204
- Prokul Woliński
Jaka jest wielkość wektorowa?
A Wielkość wektora Jest to każde wyrażenie reprezentowane przez wektor, który ma wartość numeryczną (moduł), kierunek, kierunek i punkt zastosowania. Niektóre przykłady wielkości wektorowych to przemieszczenie, prędkość, wytrzymałość i pole elektryczne.
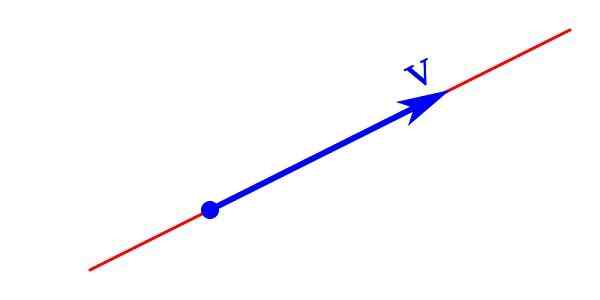
Graficzna reprezentacja wielkości wektorowej składa się ze strzałki, której końcówka wskazuje na jej kierunek i kierunek, jego długość jest modułem, a punktem początkowym jest pochodzenie lub punkt zastosowania.
Graficzna reprezentacja wektora Wielkość wektora jest reprezentowana analitycznie z literą, która przenosi strzałkę na szczycie prawej strony w kierunku poziomym. Może być również reprezentowany listem napisanym odważnym V którego moduł ǀVǀ Jest napisane kursywą V.
Jednym z zastosowań pojęcia wielkości wektora jest projektowanie autostrad i dróg, szczególnie w projektowaniu jej krzywizny. Inną aplikacją jest obliczenie przemieszczenia między dwoma miejscami lub zmiana prędkości pojazdu.
Elementy wielkości wektorowej
Wielkość wektora jest dowolną jednostką reprezentowaną przez segment linii, z orientacją w przestrzeni, która ma charakterystykę wektora. Jego elementy to:
Moduł: Jest to wartość liczbowa wskazująca wielkość lub intensywność wielkości wektora.
Adres: To orientacja segmentu linii w zawierającej go przestrzeni. Wektor może mieć kierunek poziome, pionowe lub pochylone; Północ, południe, ten lub zachód; Północno -wschodni, południowo -wschodni, południowy lub północno -zachodni.
Sens: Jest to wskazane końcówką strzałki na końcu wektora.
Może ci służyć: fizyka przed Greków (Antigua Grecja)Punkt aplikacji: Jest to pochodzenie lub punkt początkowego działania wektora.
Klasyfikacja wektorowa
Wektory są klasyfikowane jako kolinearne, równoległe, prostopadłe, współbieżne, kuplety, bezpłatne, przesuwane, przeciwnie, sprzęt, stały i jednostkowy.
Colineal: Należą lub działają na tej samej linii prostej, są również nazywane zależne od linii I mogą być pionowe, poziome i nachylone.
Parallele: Mają ten sam adres lub skłonność.
Prostopadły: Dwa wektory są prostopadłe do siebie, gdy kąt między nimi wynosi 90 °.
Równoległy: Są wektorami, które przesuwając się nad linią akcji, zbiegają się w tym samym punkcie w kosmosie.
Coplanarios: Działają w płaszczyźnie, na przykład samolot Xy.
Bezpłatny: Poruszają się w dowolnym miejscu w przestrzeni, zachowując swój moduł, kierunek i znaczenie.
Slajd: Poruszają się wzdłuż linii działania określonego przez ich kierunek.
Przeciwieństwa: Mają ten sam moduł i kierunek oraz przeciwny kierunek.
Sprzęt: Mają ten sam moduł, kierunek i znaczenie.
Naprawił: Punkt aplikacji ma niezmienne.
Unitary: Wektory, których modułem jest jednostka.
Komponenty wektorowe
Wielkość wektora w trójwymiarowej przestrzeni jest reprezentowana w układzie trzech osi prostopadłych do siebie (X i Z) Orthogonal wypróbował.
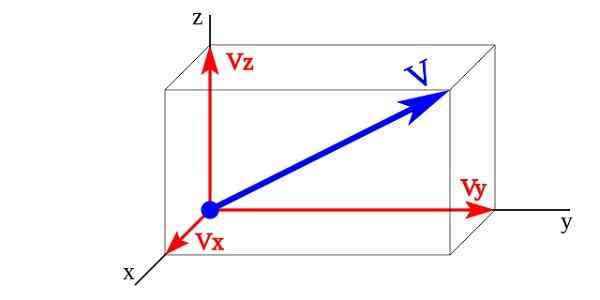 Składniki wektorowe o wielkości wektorowej
Składniki wektorowe o wielkości wektorowej Na obrazie wektory VX, Vy, VZ to elementy wektorowe wektorowe V których wektory jednostkowe są X,I,z. Wielkość wektora V Jest reprezentowany przez sumę komponentów wektorowych.
V = Vx + Vy + VZ
Wynikiem kilku wielkości wektorowych jest suma wektorowa wszystkich wektorów i zastępuje te wektory w układzie.
Pole wektorowe
Pole wektorowe jest regionem przestrzeni, w której w każdym z jego punktów odpowiada wielkości wektora. Jeśli objawiająca się wielkość jest siłą działającą na ciało lub układ fizyczny, pole wektorowe jest polem sił.
Może ci służyć: Twierdzenie Steiner: Wyjaśnienie, aplikacje, ćwiczeniaPole wektorowe jest reprezentowane graficznie przez linie pola, które są styczną linii wielkości wektora we wszystkich punktach w regionie. Niektóre przykłady pól wektorowych to pole elektryczne utworzone przez punktualny ładunek elektryczny w polu przestrzeni i prędkości płynu.
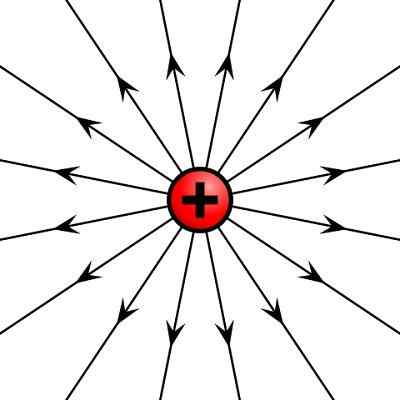 Pole elektryczne utworzone przez dodatni ładunek elektryczny
Pole elektryczne utworzone przez dodatni ładunek elektryczny Operacje z wektorami
Dodanie wektorów: Jest to wynik dwóch lub więcej wektorów. Jeśli masz dwa wektory ALBO I P Suma jest ALBO + P = q. Wektor Q Jest to wynikowy wektor, który jest uzyskiwany graficznie poruszający pochodzenie wektora DO do końca wektora B.
Odejmowanie wektora: Odejmowanie dwóch wektorów lub i P Jest ALBO - P = Q. Wektor Q Dostajesz dodanie do wektora ALBO Twój przeciwieństwo -P. Metoda graficzna jest taka sama jak suma z różnicą, że wektor przeciwny jest przenoszony.
Produkt skalarny: Iloczyn wielkości skalarnej Do przez wielkość wektora P To wektor poseł który ma ten sam kierunek wektora P. Jeśli wielkość skalarna wynosi zero, produkt skalarny jest wektorem zerowym.
Przykłady wielkości wektora
Pozycja
Położenie obiektu lub cząstki w odniesieniu do układu odniesienia jest wektorem podawanym przez jego prostokątne współrzędne X i Z, i jest reprezentowany przez komponenty wektorowe Xî, Yĵ, ZK. Wektory Siema, J, k Są wektorami jednostkowymi.
Cząsteczka w pewnym momencie (X i Z) ma wektor pozycji R = Xî + Yĵ + ZK. Wartość liczbowa pozycji wektorowej wynosi R= √ (X2 + I2 + z2). Zmiana pozycji cząstek z jednej pozycji na drugą w odniesieniu do systemu odniesienia jest wektor Przemieszczenie δR I jest obliczane na następującym wyrażeniu wektora:
Może ci służyć: promienie anodoweΔR = r2 - R1
Przyśpieszenie
Średnie przyspieszenie (DoM) Jest zdefiniowany jako zmienność prędkości v W przedziale czasowym Δt A wyrażenie do obliczenia jest DoM= Δv/δt, istnienie Δv Prędkość zmiany wektora.
Natychmiastowe przyspieszenie (Do) to granica średniego przyspieszenia DoM Kiedy Δt staje się tak mały, że ma tendencję do zera. Natychmiastowe przyspieszenie jest wyrażone zgodnie z jego komponentami wektorowymi
Do =DoXSiema +DoI J+ Dozk
Pole grawitacyjne
Siła przyciągania grawitacyjna wywierana przez masę M, Położony u pochodzenia, na innej masie M W pewnym momencie w kosmosie X, I, z Jest to pole wektorowe zwane pole sił grawitacyjnych. Siła ta jest podana przez wyrażenie:
F= (-mmg/R)ȓ
R = Xî + Yĵ + ZK
F = Jest to siła grawitacyjna wielkości fizycznej
G = jest uniwersalną stałą grawitacji
ȓ = jest wektorem pozycji masowej M
Bibliografia
- Tallack, J C. Wprowadzenie do analizy wektorowej. Cambridge: Cambridge University Press, 2009.
- Spiegel, M R, Lipschutz, S i Spellman, D. Wektor analizy. S.L. : MC Graw Hill, 2009.
- Marka, l. Wektor analizy. New York: Dover Publications, 2006.
- Griffiths, D J. Wprowadzenie do elektrodynamiki. New Jersey: Prentice Hall, 1999. P. 1-10.
- Haga, ur. Wprowadzenie do analizy wektorowej. Glasgow: Methuen & Co. Ltd, 2012.