

Funkcje wektora
- 628
- 103
- Eliasz Dubiel
Jakie są funkcje wektorowe?
A funkcja wektora parametru T, Jest to funkcja, której domena są prawdziwymi wartościami T, podczas gdy trasa jest tworzona przez wektory formy R (T). Taka funkcja można wyrazić jako:
R (T) = f (T) Siema + G (T) J + H (T) k
Gdzie Siema, J I k Są to wektory jednostkowe w trzech głównych kierunkach przestrzeni, a funkcje F, G i H są rzeczywistymi funkcjami zmiennej T. Notacja wykorzystuje Bold, aby rozróżnić wielkości wektorowe.
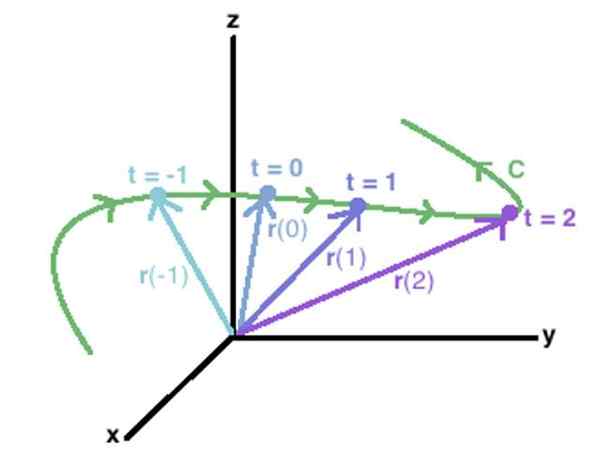 Funkcję wektora w przestrzeni można użyć do opisania krzywej C, łącząc ekstremalne punkty każdego z wektorów określonych przez wspomnianą funkcję. Źródło: Wikidot.
Funkcję wektora w przestrzeni można użyć do opisania krzywej C, łącząc ekstremalne punkty każdego z wektorów określonych przez wspomnianą funkcję. Źródło: Wikidot. Innym sposobem oznaczania funkcji wektorowej są nawiasy kwadratowe:
R (T) =
Funkcje wektorowe można wykorzystać do badania krzywych w płaszczyźnie i przestrzeni, takich jak trajektoria, która podąża za ruchomym obiektem. Przykładem jest przypowieść opisana przez rzutowaną piłkę z początkową prędkością, pod grawitacją.
Jeśli chcesz poznać pozycję piłki w każdej chwili T, Funkcja wektora z dwoma komponentami, jednym poziomym i jednym pionowym:
R (T) = x (T) Siema + I(T) J
Oba x (T) jak y (T) Są funkcjami czasowymi T. Zatem przy dołączaniu do ekstremalnych punktów każdego z wektorów R(T) Możliwe, uformuj przypowieść opisaną przez piłkę w płaszczyźnie Xy.
Koncepcja łatwo rozciąga się na krzywą C w przestrzeni, na przykład ta pokazana na powyższym rysunku. Pojawiają się w nim wektory R (-1), R (0), R (1) R (2), których końce narysują krzywą C, narysowane na zielono.
Limity, pochodne i całka funkcji wektorowych
Narzędzia obliczeniowe mające zastosowanie do rzeczywistych funkcji zmiennych rzeczywistych można również zastosować do funkcji wektorowych.
Może ci służyć: czynnikowanieLimit funkcji wektorowej
Limit funkcji wektora R (T) = f (T) Siema + G (T) J + H (T) k, Gdy t → a, jest to zdefiniowane jako:
=\left%20[%20\displaystyle%20\lim_%20t\to%20a%20f(t)\right%20]\textbfi+\left%20[%20\displaystyle%20\lim_%20t\to%20a%20g(t)\right%20]\textbfj+\left%20[%20\displaystyle%20\lim_%20t\to%20a%20h(t)\right%20]\textbfk)
Zakładając, że istnieją odpowiednie granice F (T), G (T) i H (T), Kiedy T → a.
Pochodzący z funkcji wektorowej
Definicja pochodzenia z funkcji wektorowej R (t) = f (T) Siema + G (T) J + H (T) k Jest analogiczny do funkcji pochodnej rzeczywistej funkcji zmiennej rzeczywistej. Powołanie R„(t) do wspomnianej pochodnej, masz:
=\displaystyle%20\lim_\Delta%20t%20\to%200\frac\mathbfr(t+\Delta%20t)-\mathbfr(t)\Delta%20t)
Pochodna istnieje, gdy istnieje poprzedni limit, a jeśli tak, funkcja R(T) jest zróżnicowany w T.
Integral funkcji wektorowej
Być R (t) = f (T) Siema + G (T) J + H (T) k funkcja wektorowa, taka, że funkcje F, G i H są zintegrowane w T.
Więc:
dt%20=\left%20[%20\int%20f(t)dt%20\right%20]\mathbfi+\left%20[%20\int%20g(t)dt%20\right%20]\mathbfj+\left%20[%20\int%20h(t)dt%20\right%20]\mathbfk+\mathbfC)
Z:
C = c1 Siema + C2 J
Co oznacza, że stała integracji jest również wektorem, ale stała.
Przykłady funkcji wektora
Przykład 1
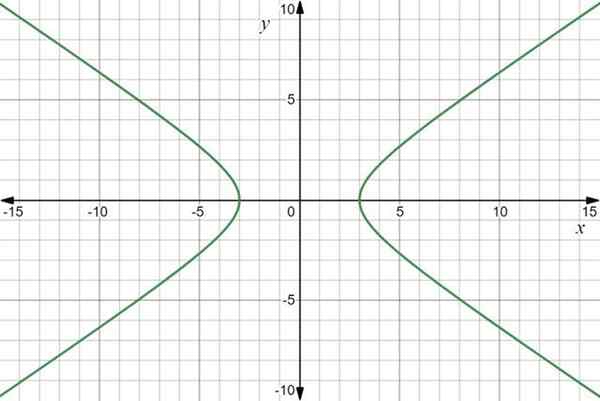
Masz funkcję wektora podaną przez R (T) = 3Sec T Siema + 2Tan T J. Możliwe jest ocenę go pod kątem różnych wartości t, takich jak t = π/4 i t = π, co daje wektory R (π/4) i R (π):
R (π/4) = 3sec (π/4) Siema + 2Tan (π/4) J = 3√2 Siema + 2 J
R (π) = 3sec (π) Siema+2Tan (π) J = - 3 Siema
Jednakże, R (T) Nie istnieje dla wartości t = ∓π/2, ∓3π/2, ∓5π/2…, ponieważ funkcja SEC T = 1 /cos T Nie jest zdefiniowane, czy to tak T = Sen T / cos T.
Dlatego domeną funkcji r (t) jest wszystkie rzeczywiste wartości t, z wyjątkiem wartości:
∓ (2n+1) π/2; Z n = 0, 1, 2, .. .
Wykres funkcji to hiperbola:
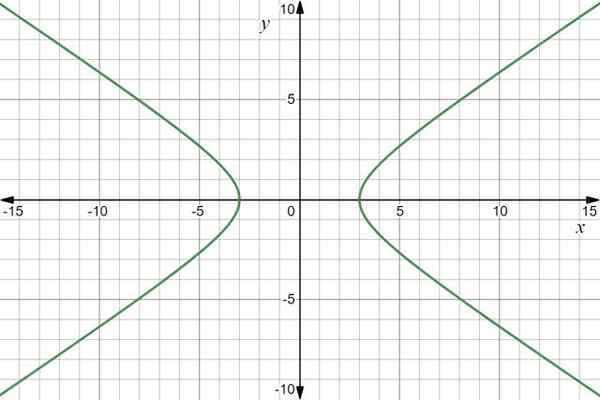 Wykres funkcji wektora R (t) = 3Sec t Siema+2 tan t J. Źródło: f. Zapata przez Desmos.
Wykres funkcji wektora R (t) = 3Sec t Siema+2 tan t J. Źródło: f. Zapata przez Desmos. Przykład 2
W porzuceniu pocisku pozycja mobilna jest funkcją wektora R (T) = x (T) Siema + I(T) J . Zakładając, że odporność na powietrze nie interweniuje, a grawitacja jest jedyną siłą, która działa na telefon komórkowy, ruch poziome jest jednolite prostoliniowe, podczas gdy pionowy jest jednolicie przyspieszony, wynoszącym g = 9.8 m/s2 Wartość przyspieszenia. To przyspieszenie jest pionowe w kierunku ziemi.
Może ci służyć: zasady pochodzenia (z przykładami)W takim przypadku funkcje x (T) I (T) Są odpowiednio:
- x (t) = xalbo + vwół∙ t
- i (t) = yalbo + vOy∙ t - ½ gt2
Kwoty vwół i vOy Są to elementy funkcji wektora, która przez cały czas opisuje prędkość mobilną:
v (T) = vX(T) Siema + vI(T) J
Z:
- vwół = valbo∙ cos θ
- vOy = valbo∙ Sen θ
Będąc θ kątem, który tworzy początkową prędkość w stosunku do poziomu.
Ze swojej części początkowa pozycja telefonu komórkowego jest punktem współrzędnym (xalbo,Ialbo) lub równoważnie wektor pozycji podany przez:
Ralbo (T) = xalbo Siema + Ialbo J
Zauważ, że w pokazanych równaniach znak ujemny został przypisany do kierunku pionowego, więc trzeci termin równania dla y (t) przyjmuje go. Możliwe jest również przypisanie pochodzenia do początkowej pozycji telefonu komórkowego.
Natychmiastowa prędkość pocisku
Odwrotna prędkość v (t) jest pierwsza po pozycji, w odniesieniu do czasu. Oblicza się go poprzez zastosowanie znanych zasad pochodzenia:
v(t) = R ' (T) = [x (T) Siema + I(T) J]'= X '(T) Siema + I'(T) J = vwół Siema + (vOy - GT) J
Moduł prędkości jest podany przez:

Natychmiastowe przyspieszenie pocisku
Wiadomo, że jest to G, w kierunku pionowym i kierunku w dół. Jest to weryfikowane, wiedząc, że przyspieszenie jest pierwszą pochodną prędkości w odniesieniu do czasu (lub drugiej pochodnej pozycji w odniesieniu do czasu, jeśli jest preferowana):
Do(t) = V ' (T) = [Vwół Siema + (vOy - GT) J] '= [Vwół Siema] '+ [(vOy - GT) J] '= = - g J
Jest to właśnie oczekiwany wynik.
Ćwiczenie rozwiązane
Biorąc pod uwagę funkcję wektora R (T) = 3T Siema + (T - 1) J, znajdować R '(t) i R "(T).
Rozwiązanie
Stosując zasady wyprowadzania do każdego z komponentów, masz:
Może ci służyć: stała integracji: znaczenie, obliczenia i przykładyR '(t) = = 3 Siema + J
A ponieważ pochodna stałej wynosi 0:
R "(t) = 0
To jest do powiedzenia, R "(t) jest równe wektorowi zerowej.
Bibliografia
- Figueroa, zm. 2005. Seria: Fizyka nauk i inżynierii. Tom 1. Kinematyka. Pod redakcją Douglas Figueroa (USB).
- Larson, r. Obliczanie za pomocą geometrii analitycznej. 2. Wydanie. McGraw Hill.
- Mathonline. Funkcje wektorowe. Odzyskane z: Mathonline.Wikidot.com.
- Opentax. Rachunek Tom 3. Źródło: OpenStax.org.
- Purcell, e. J. 2007. Obliczenie. Edukacja Pearsona.