

Jaka jest prędkość liniowa? (Z rozwiązanymi ćwiczeniami)
- 1129
- 26
- Marianna Czarnecki
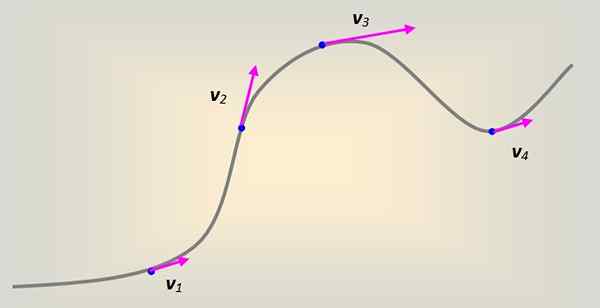
Prędkość liniowa Jest zdefiniowany jako ten, który jest zawsze styczny do trajektorii, a następnie cząsteczka, niezależnie od tego. Jeśli cząstka zawsze porusza się w trajektorii prostoliniowej, nie ma problemu z wyobrażeniem sobie, w jaki sposób wektor prędkości towarzyszy ta linia prosta.
Jednak ogólnie ruch jest przeprowadzany na krzywej arbitralnie. Każda część krzywej można modelować tak, jakby była częścią koła radiowego Do, które w każdym punkcie jest styczne do ścieżki.
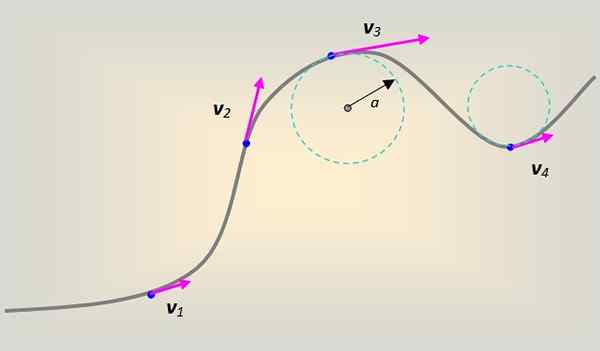 Rysunek 1. Prędkość liniowa na telefonie komórkowym, który opisuje krzywoliniową trajektorię. Źródło: Self Made.
Rysunek 1. Prędkość liniowa na telefonie komórkowym, który opisuje krzywoliniową trajektorię. Źródło: Self Made. W takim przypadku prędkość liniowa towarzyszy stycznie i przez cały czas do krzywej w każdym punkcie.
Matematycznie natychmiastowa prędkość liniowa jest pochodną pozycji w odniesieniu do czasu. Być R wektor położenia cząstki w jednej chwili T, Następnie wyrażenie podaje prędkość liniową:
v = R'(T) = dR / dt
Oznacza to, że prędkość liniowa lub prędkość styczna, jak się nazywa, jest niczym innym jak zmianą pozycji w odniesieniu do czasu.
[TOC]
Prędkość liniowa w ruchu okrągłym
Kiedy ruch jest obwód, możemy w każdym punkcie przejść obok cząstki i zobaczyć, co stanie się w dwóch bardzo specjalnych kierunkach: jeden z nich jest tym, który zawsze wskazuje na środek. To jest adres promieniowy.
Innym ważnym kierunkiem jest ten, który ma miejsce na obwodzie, to jest adres styczny A prędkość liniowa zawsze ją ma.
Może ci służyć: ciśnienie manometryczne: wyjaśnienie, wzory, równania, przykłady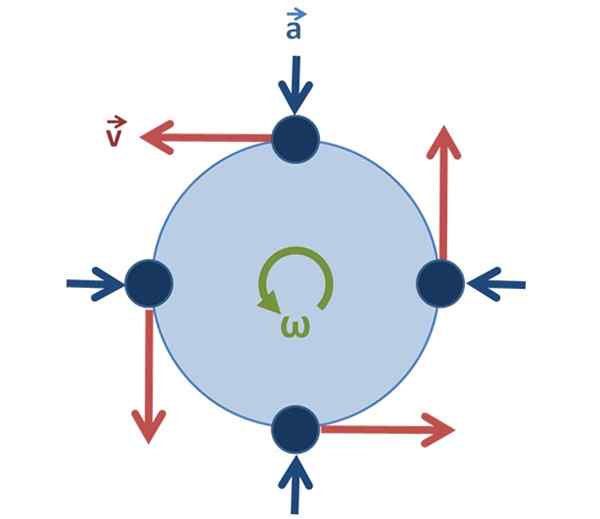 Rysunek 2. Jednolity ruch kołowy: wektor prędkości zmienia kierunek i kierunek, gdy cząstka się obraca, ale jego wielkość jest taka sama. Źródło: Original by User: Brews_ohare, SVED przez użytkownika: Sjleg [CC BY-SA 3.0 (https: // creativeCommons.Org/licencje/by-sa/3.0)].
Rysunek 2. Jednolity ruch kołowy: wektor prędkości zmienia kierunek i kierunek, gdy cząstka się obraca, ale jego wielkość jest taka sama. Źródło: Original by User: Brews_ohare, SVED przez użytkownika: Sjleg [CC BY-SA 3.0 (https: // creativeCommons.Org/licencje/by-sa/3.0)]. W przypadku jednolitego ruchu okrągłego jest ważne tak, pozostaje niezmienione.
W przypadku tego ruchu pozycja w funkcji czasu jest podana przez S (t), Gdzie S czy on jest Tourd Arc I T Już czas. W takim przypadku chwilowa prędkość wyraża wyrażenie V = ds/dt I jest stały.
Jeśli wielkość prędkości również różni się (wiemy już, że kierunek zawsze to robi, w przeciwnym razie telefon nie mógł się obrócić), stajemy w obliczu różnorodnego ruchu okrągłego, podczas którego mobilne oprócz obrotu może zatrzymać lub przyspieszyć.
Prędkość liniowa, prędkość kątowa i przyspieszenie dośrodkowe
Ruch cząstek można również zobaczyć z punktu widzenia Kąt zamiatania, Zamiast robić to z bramki podróży. W tym przypadku mówi się o prędkość kątowa. Do ruchu w kręgu radiowym R, Istnieje związek między łukiem (w radianach) a kątem:
S = r θ
Duszowanie w odniesieniu do obu stron:
ds/dt = r (dθ/dt)
Nazywając pochodną θ w odniesieniu do T Jak prędkość kątowa I oznaczając go grecką literą ω „omega”, masz ten związek:
v = ωR
Przyspieszenie dośrodkowe
Każdy ruch kołowy ma przyspieszenie dośrodkowe, To zawsze jest skierowane w kierunku środka obwodu. Uważa, że prędkość zmienia się, aby poruszać się z cząsteczką, gdy się obraca.
Może ci służyć: krzywa kalibracji: po co to zrobić, jak to zrobić, przykładyPrzyspieszenie dośrodkowe DoC albo DoR Zawsze wskazuje na środek (patrz rysunek 2) i jest związany z prędkością liniową w ten sposób:
DoC = v2 /R
I z prędkością kątową jako:
DoC = (ΩR)2 /R = ω2R
W przypadku jednolitego ruchu okrągłego pozycja S (t) Jest to forma:
S (t) = so+ vt
Ponadto zróżnicowany ruch kołowy musi mieć element zwanego przyspieszenia Styczne przyspieszenie DoT, To dotyczy zmiany wielkości prędkości liniowej. Tak DoT To jest stałe, Pozycja to:
S (t) = salbo + valboT + ½ aTT2
Z valbo Jak początkowa prędkość.
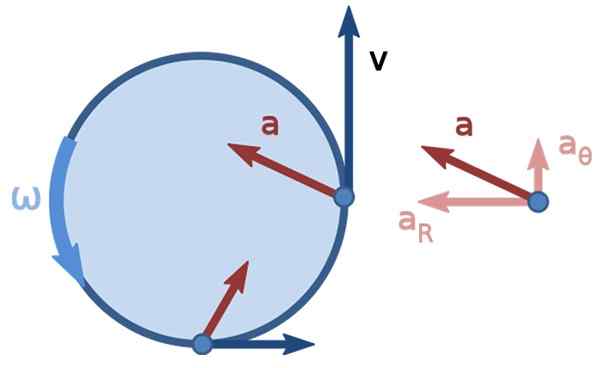 Rysunek 3. Nieprzezroczysty ruch okrągły. Źródło: NonUniform_circular_motion.PNG: Brews Ohredorivative Prace: Kooning Jons [CC BY-SA 3.0 (https: // creativeCommons.Org/licencje/by-sa/3.0)].
Rysunek 3. Nieprzezroczysty ruch okrągły. Źródło: NonUniform_circular_motion.PNG: Brews Ohredorivative Prace: Kooning Jons [CC BY-SA 3.0 (https: // creativeCommons.Org/licencje/by-sa/3.0)]. Rozwiązane ćwiczenia liniowe
Rozwiązane ćwiczenia przyczyniają się do wyjaśnienia właściwego zastosowania podanych pojęć i równań.
-Ćwiczenie rozwiązane 1
Owad porusza się na półkurku promienia r = 2 m, zaczynając od spoczynku w punkcie A podczas zwiększenia prędkości liniowej, z prędkością p m/s2. Znajdź: a) Po tym, o której godzinie osiąga punkt B, B) Wektor prędkości liniowej w tym momencie, C) Przyspieszenie wektora w tym momencie.
 Rysunek 4. Owad zaczyna się od A i dociera do B na półkolistej trajektorii. Ma prędkość liniową. Źródło: Self Made.
Rysunek 4. Owad zaczyna się od A i dociera do B na półkolistej trajektorii. Ma prędkość liniową. Źródło: Self Made. Rozwiązanie
a) Oświadczenie wskazuje, że przyspieszenie styczne jest stałe i jest warte π m/s2, Wówczas ważne jest użycie równania do równomiernie zróżnicowanego ruchu:
S (t) = salbo + valboT + ½ aT.T2
Z salbo = 0 i valbo = 0:
S (t) = ½ aT.T2
S = πR (Połowa długości obwodu)
T = (2. πR /DoT) ½ S = (2π.2 /π)½S = 2 s
B) v (t) = valbo + DoT. T = 2π SM
Gdy w punkcie B liniowy wektor prędkości wskazuje w kierunku pionowym w dół w kierunku (-I):
Może ci służyć: jaka jest stała dielektryczna?v (t) = 2π SM(-I)
c) Przyspieszenie styczne jest już miało, brakuje przyspieszenia dośrodkowego, aby mieć wektor prędkości Do:
DoC = v2 / R = (2π)2 / 2 m/ s2 = 2π2 SM2
Do = aC (-X) + aT (-I) = 2π2(-X)+ π (-I) SM2
-Ćwiczenie rozwiązane 2
Cząstka obraca się w okręgu radiowym 2.90 m. W pewnym momencie jego przyspieszenie jest warte 1.05 m/s2 w takim kierunku, który tworzy 32 z kierunkiem ruchu. Znajdź swoją liniową prędkość przy: a) w tej chwili, b) 2 sekundy później, zakładając, że przyspieszenie styczne jest stałe.
Rozwiązanie
a) Dyrekcja ruchu jest dokładnie adresem stycznym:
DoT = 1.05 m/s2 . cos 32º = 0.89 m/s2 ; DoC = 1.05 m/s2 . Sen 32º = 0.56 m/s2
Prędkość wyczyściła DoC = v2 / R Jak:
v = (r.DoC)1/2 = 1.27 m/s
b) Równanie dla równomiernie zróżnicowanego ruchu jest ważne w następujący sposób: v = valbo + DoTT = 1.27 + 0.89 .22 m/s = 4.83 m/s
Bibliografia
- Bauer, w. 2011. Fizyka inżynierii i nauki. Tom 1. MC Graw Hill. 84-88.
- Figueroa, zm. Seria fizyczna dla nauki i inżynierii. Tom 3. Wydanie. Kinematyka. 199-232.
- Giancoli, zm. 2006. Fizyka: zasady z aplikacjami. 6th… Ed Prentice Hall. 62-64.
- Ruch względny. Odzyskane z: kursów.Lumenarning.com
- Wilson, J. 2011. Fizyka 10. Edukacja Pearsona. 166-168.
- « Vicente Riva Palacio Biografia, styl, prace, frazy
- Charakterystyka klimatu pustynnego, lokalizacja, typy, flora, fauna »