

Charakterystyka ruchu prostoliniowego, typy i przykłady

- 1827
- 570
- Eliasz Dubiel
On Ruch prostoliniowy Jest to taki, w którym telefon komórkowy porusza się wzdłuż linii prostej, a zatem przechodzi w wymiarze, a zatem również otrzymuje nazwę Ruch jednoznaczny. Ta linia prosta jest trajektoria lub ścieżka, a następnie obiekt, który się porusza. Samochody podróżujące wzdłuż alei na rycinie 1 podążają za tym typem ruchu.
To najprostszy model ruchu, który można sobie wyobrazić. Codzienne ruchy ludzi, zwierząt i rzeczy często łączą transfery w linii prostej z ruchami wzdłuż krzywych.
Rysunek 1. Samochody poruszające się wzdłuż prostoliniowej alei. Źródło: Pixabay. Oto kilka dobrych przykładów:
- Podczas biegania wzdłuż 200 -metrowej prostoliniowej ścieżki.
- Prowadzenie samochodu po prostej drodze.
- Swobodne upuszczanie obiektu z pewnej wysokości.
- Kiedy piłka jest rzucana pionowo.
https: // giphy.COM/GIFS/J5XX3BYNAQV06WTOXQ
Teraz cel opisania ruchu osiąga się poprzez określenie cech, takich jak:
- Pozycja
- Przemieszczenie
- Prędkość
- Przyśpieszenie
- Czas.
Aby obserwator mógł wykryć ruch obiektu, konieczne jest posiadanie punktu odniesienia (pochodzenia o) i ustanowić określony adres, na którym można się poruszać, który może być osą X, Oś I lub jakikolwiek inny.
Jeśli chodzi o obiekt, który się porusza, może to mieć niezliczone sposoby. W tym względzie nie ma ograniczeń, jednak we wszystkim, co następuje, zostanie założone, że telefon komórkowy jest cząsteczką; obiekt tak mały, że jego wymiary nie są istotne.
Wiadomo, że nie dotyczy to obiektów makroskopowych; Jest to jednak model z dobrymi wynikami w opisie globalnego ruchu obiektu. W ten sposób cząsteczką może być samochód, planeta, osoba lub inny przedmiot, który się porusza.
Rozpoczniemy nasze badanie kinematyki prostoliniowej z ogólnym podejściem do ruchu, a następnie poszczególne przypadki zostaną zbadane jako te już mianowane.
[TOC]
Ogólne cechy ruchu prostoliniowego
Poniższy opis jest ogólny i ma zastosowanie do dowolnego rodzaju ruchu jednego wymiaru. Pierwszą rzeczą jest wybranie systemu referencyjnego. Linia, wzdłuż której ma miejsce ruch, będzie osi X. Parametry ruchu:
Pozycja
 Rysunek 2. Pozycja telefonu komórkowego, który porusza się po osi x. Źródło: Wikimedia Commons (zmodyfikowane przez F. Zapata).
Rysunek 2. Pozycja telefonu komórkowego, który porusza się po osi x. Źródło: Wikimedia Commons (zmodyfikowane przez F. Zapata). Jest to wektor, który przechodzi od pochodzenia do punktu, w którym obiekt jest w danym momencie. Na rycinie 2 wektor X1 Wskazuje pozycję telefonu komórkowego, gdy jest ona w współrzędnej P1 i z czasem T1. Jednostki wektorowe pozycji w systemie międzynarodowym są metry.
Przemieszczenie
Przemieszczenie jest wektorem wskazującym zmianę pozycji. Na rycinie 3 samochód przeszedł z pozycji P1 do pozycji P2, Dlatego jego przemieszczenie wynosi δX = X2 - X1. Przemieszczenie jest odejmowaniem dwóch wektorów, jest symbolizowane z literą grecką δ („delta”) i z kolei wektor. Jego jednostki w systemie międzynarodowym są metry.
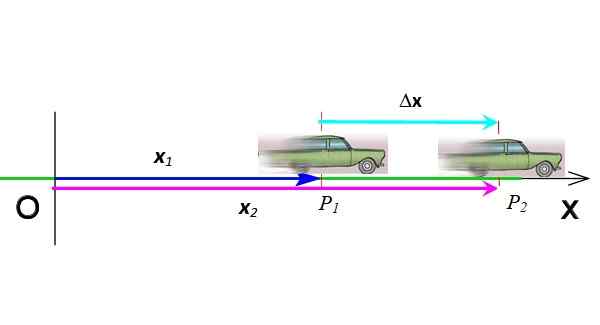 Rysunek 3. Przemieszczenie wektora. Źródło: Przygotowane przez F. Zapata.
Rysunek 3. Przemieszczenie wektora. Źródło: Przygotowane przez F. Zapata. Wektory są oznaczone odważnym tekstem w wydrukowanym. Ale będąc w tym samym wymiarze, w razie potrzeby możesz obejść się bez notacji wektorowej.
Może ci służyć: gałęzie klasycznej i nowoczesnej fizykiPrzebyty dystans
Dystans D Zwiedzony ruchomym obiektem jest wartość bezwzględna wektora przemieszczenia:
D = ΙXΙ = δX
Będąc wartością bezwzględną, przejechana odległość jest zawsze większa lub równa 0, a jej jednostki są takie same jak w pozycji i przesunięciu. Notację wartości bezwzględnej można wykonać za pomocą pasków modułów lub po prostu usuwanie odważnej litery w drukowanym tekście.
Średnia prędkość
Jak szybko zmienia się pozycja? Istnieją powolne i szybkie telefony komórkowe. Kluczem zawsze była prędkość. Aby przeanalizować ten czynnik, analizowana jest pozycja X funkcja czasu T.
Średnia prędkość vM (Patrz rysunek 4) Jest to nachylenie linii suszenia (fuksia) do krzywej X vs T i dostarcza globalnych informacji o przemieszczeniu mobilnym w rozważanym przedziale czasu.
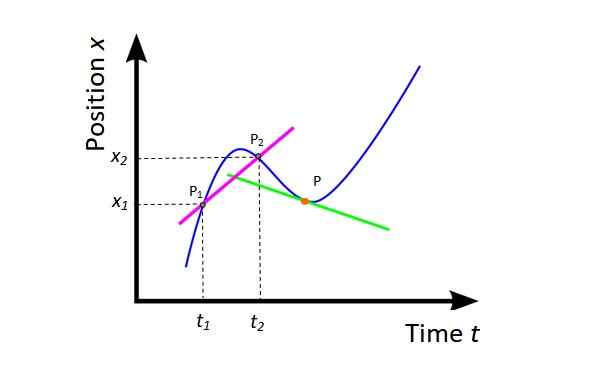 Rysunek 4. Średnia prędkość i natychmiastowa prędkość. Źródło: Wikimedia Commons, zmodyfikowane przez F. Zapata.
Rysunek 4. Średnia prędkość i natychmiastowa prędkość. Źródło: Wikimedia Commons, zmodyfikowane przez F. Zapata. vM = (X2 - X1) / (T2 -T1) = ΔX / ΔT
Średnia prędkość to wektor, którego jednostki w systemie międzynarodowym są metry /sekunda (SM).
Chwilowa prędkość
Średnia prędkość jest obliczana przez wykonanie mierzalnego przedziału czasu, ale nie informuje o tym, co dzieje się we wspomnianym przedziale. Aby poznać prędkość w dowolnym momencie, musisz sprawić, by przedział czasu był bardzo mały, matematycznie jest to równoważne:
ΔT → 0
Równanie jest wcześniej podawane dla średniej prędkości. W ten sposób uzyskana jest szybkość chwilowej lub po prostu prędkości:
Geometrycznie, pochodną pozycji w odniesieniu do czasu jest nachylenie stycznej linii do krzywej X vs T w danym momencie. Na rycinie 4 punkt jest pomarańczowy, a linia styczna jest zielona. Natychmiastowa prędkość w tym momencie jest nachyleniem tej linii.
Prędkość
Prędkość jest definiowana jako moduł wartości bezwzględnej lub prędkości i jest zawsze dodatnia (sygnalizacja, drogi i autostrady są zawsze pozytywne, nigdy ujemne). Terminy „prędkość” i „prędkość” mogą być używane codziennie, ale w fizyce konieczne jest rozróżnienie między wektorem a wspinaczką.
v = ΙvΙ = v
Średnie przyspieszenie i natychmiastowe przyspieszenie
Prędkość może się zmienić w trakcie ruchu, a rzeczywistość jest taka, że oczekuje się, że to zrobi. Istnieje wielkość, która kwantyfikuje tę zmianę: przyspieszenie. Jeśli zauważymy, że prędkość jest zmianą pozycji w odniesieniu do czasu, przyspieszenie to zmiana prędkości w odniesieniu do czasu.
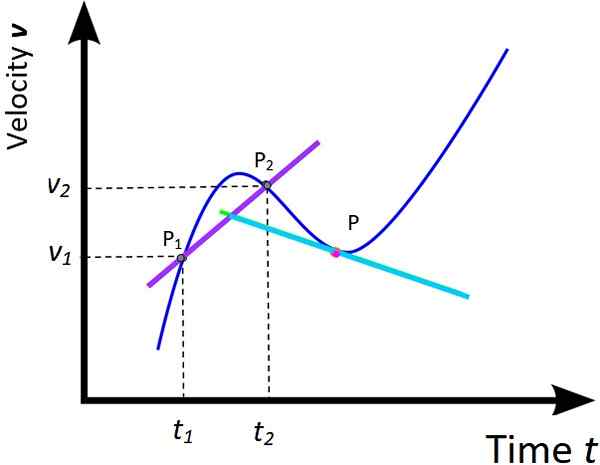 Rysunek 5. Średnie przyspieszenie i natychmiastowe przyspieszenie. Źródło: Wikimedia Commons, zmodyfikowane przez F. Zapata.
Rysunek 5. Średnie przyspieszenie i natychmiastowe przyspieszenie. Źródło: Wikimedia Commons, zmodyfikowane przez F. Zapata. Leczenie podane na wykres X vs T z dwóch poprzednich sekcji można rozszerzyć na odpowiedni wykres v vs T. W związku z tym średnie przyspieszenie i natychmiastowe przyspieszenie są zdefiniowane jako:
DoM = (v2 - v1) / (T2 -T1) = Δv / ΔT (W oczekiwaniu na siedzibę)
) Przyspieszenie i Opóźnienie
Przyspieszenie i Opóźnienie
W jednym ruchu wektory według konwencji mają pozytywne lub negatywne znaki, gdy idą w taki czy inny sposób. Kiedy przyspieszenie ma takie samo znaczenie co prędkość, zwiększa swoją wielkość, ale gdy ma to przeciwny sens, a prędkość zmniejsza jego wielkość. Następnie mówi się, że ruch jest opóźniony.
Może ci służyć: Leyden Butelka: części, operacja, eksperymentyChłopaki
Klasyfikacja ruchów prostoliniowych jest zwykle wykonywana na podstawie:
- Czy przyspieszenie jest stałe.
- Ruch przechodzi wzdłuż linii poziomej lub pionowej.
Ruch z ciągłym przyspieszeniem
https: // giphy.com/gifs/ylzfnbidhm7rp391fi
Gdy przyspieszenie jest stałe, średnie przyspieszenie DoM Jest to równe natychmiastowym przyspieszeniu Do I są dwie opcje:
- Że przyspieszenie jest warte 0, w którym to przypadku prędkość jest stała i ma jednolity ruch prostoliniowy lub MRU.
- Stałe przyspieszenie różni się od 0, w których prędkość rośnie lub maleje liniowo z czasem (ruch prostoliniowy równomiernie zmienny lub MRUV):
Gdzie vF I TF Są to odpowiednio ostatnia prędkość i czas i valbo I Talbo Są to początkowe prędkość i czas. Tak Talbo = 0, Podczas wyczyszczenia ostatniej prędkości masz już równanie dla ostatecznej prędkości:
vF = valbo + NA
W przypadku tego ruchu ważne są również ważne równania:
- Pozycja w zależności od czasu: x = xalbo + valbo .t +½ w2
- Prędkość w zależności od pozycji: vF2 = valbo2 + 2.ΔX (Z δx = x - xalbo)
Ruchy poziome i ruchy pionowe
Ruchy poziome to te, które przechodzą wzdłuż osi poziomej lub osi x, podczas gdy pionowe robią to wzdłuż osi i osi. Ruchy pionowe pod działaniem grawitacji są najczęstsze i interesujące.
W poprzednich równaniach jest przyjmowany A = g = 9.8 m/s2 skierowany pionowo, kierunek, który prawie zawsze jest wybierany z znakiem ujemnym.
Tą drogą, vF = valbo + NA To się zmienia vF = valbo - Gt A jeśli początkowa prędkość wynosi 0, ponieważ obiekt został upuszczony swobodnie, jest on bardziej uproszczony vF = - gt. Oczywiście, o ile nie bierze się pod uwagę opór powietrza.
Rozwiązane przykłady
Przykład 1
W punkcie uwolniono mały pakiet, aby poruszał się wzdłuż transportera z przesuwnymi kółkami ABCD pokazanymi na rysunku. Pakiet przechodzący przez nachylone sekcje AB i CD, pakiet ma przyspieszenie 4,8 m/s2, podczas gdy w sekcji poziomej BC utrzymuje stałą prędkość.
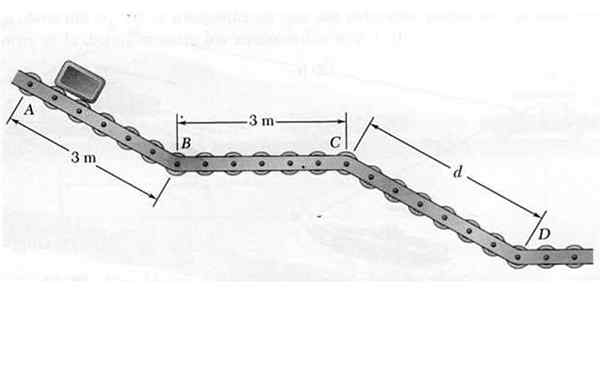 Rysunek 6. Pakiet, który porusza się po przesuwnej ścieżce rozwiązanego przykładu 1. Źródło: Self Made.
Rysunek 6. Pakiet, który porusza się po przesuwnej ścieżce rozwiązanego przykładu 1. Źródło: Self Made. Wiedząc, że prędkość, z jaką osiąga się pakiet w D, wynosi 7,2 m/s, określ:
a) odległość między C i D.
b) Czas wymagany do osiągnięcia końca.
Rozwiązanie
Ruch pakietu jest przeprowadzany w trzech pokazanych sekcjach prostoliniowych i aby obliczyć żądane, prędkość jest wymagana w punktach B, C i D. Przeanalizujmy każdą sekcję osobno:
Sekcja ab
Ponieważ czas nie jest dostępny w tej sekcji, będzie on używany vF2 = valbo2 + 2.ΔX Z VO = 0:
vF2 = 2a.Δx → vF2= 2. 4,8 m/s2 . 3 m = 28.8 m2/S2 → vF = 5.37 m/s = vB
Czas, jaki pakiet zabrał do podróży w sekcji AB, to:
TAb = (vF - valbo) /A = 5.37 m/s/4,8 m/s2 = 1.19 s
Sekcja BC
Dlatego prędkość w sekcji BC jest stała vB = vC = 5.37 m/s. Czas potrzebny na podróżowanie w tej sekcji to:
Może ci służyć: światła załamanie: elementy, prawa i eksperymentTpne = odległość pne / vB = 3 m/ 5.37 m/s = 0.56 s
Sekcja CD
Początkowa prędkość tego sekcji to vC = 5.37 m/s, Ostateczna prędkość jest vD = 7,2 m/s, przez vD2 = vC2 + 2. Do. D Wartość D:
D = (vD2 - vC2)/2.a = (7.22 - 5.372)/2 X 4.8 m = 2.4 m
Czas jest obliczany jako:
TCD = (vD - vC)/A = (7.2-5.37)/ 4.8 s = 0.38 s.
Odpowiedzi na zadane pytania to:
a) d = 2.4 m
b) Czas podróży to TAb + Tpne + Tpłyta CD = 1.19 s +0.56 S +0.38 s = 2.13 s.
Przykład 2
Osoba znajduje się pod poziomą bramą, która jest początkowo otwarta i wysokość 12 m. Osoba pionowo uruchamia obiekt w kierunku bramy z prędkością 15 m/s.
Wiadomo, że brama zamyka 1,5 sekundy po uruchomieniu obiektu z wysokości 2 metrów. Odporność na powietrze nie będzie brana pod uwagę. Odpowiedz na następujące pytania, uzasadniając:
a) Czy udaje ci się przekazać obiekt przez bramę, zanim się zamknie?
b) Czy obiekt kiedykolwiek zderzy się z zamkniętą bramą? Jeśli potwierdza, kiedy to się stanie?
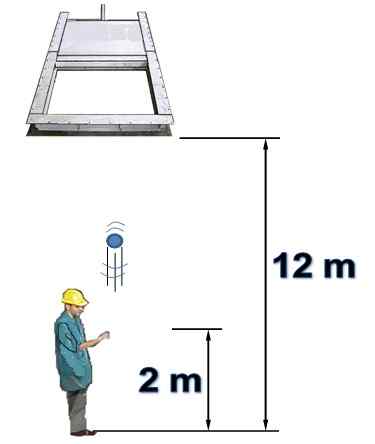 Rysunek 7. Obiekt jest uruchamiany pionowo (rozwiązany przykład 2). Źródło: Self Made.
Rysunek 7. Obiekt jest uruchamiany pionowo (rozwiązany przykład 2). Źródło: Self Made. Odpowiedz)
Istnieje 10 metrów między początkową pozycją piłki a bramą. Jest to pionowe uruchomienie, w którym ten adres jest uznawany za pozytywny.
Możesz dowiedzieć się, jaka prędkość, którą niesie, po przybyciu w tym momencie, z tym wynikiem czasu, aby to zrobić i porównać z czasem zamknięcia bramy, czyli 1.5 sekund:
vF 2= valbo 2- 2.G. Δi → vF = (152 - 2 X 9.8 X10)1/2 M = 5.39 m/s
T = (vF - valbo) /g = (5.39 - 15) / (-9.8) S = 0.98 s
Ponieważ ten czas jest mniejszy niż 1.5 sekund, a następnie stwierdza się, że obiekt może przejść przez bramę przynajmniej raz.
Odpowiedź b)
Wiemy już, że obiekt zarządza. Prędkość, gdy sięgnie na wysokości bramki, ma taką samą wielkość, jak w górę, ale w przeciwnym kierunku. Dlatego pracuj z -5.39 m/s, a czas potrzebny do osiągnięcia tej sytuacji jest:
T = (vF - valbo) /G = (-5.39 - 15) / (-9.8) S = 2.08 s
Ponieważ brama pozostaje otwarta tylko dla 1.5 s, oczywiste jest, że nie ma czasu, zanim się zamknie, ponieważ okaże się, że jest zamknięty. Odpowiedź brzmi: obiekt, jeśli zderzy się z zamkniętą bramą po 2.08 sekund po uwolnieniu, kiedy nastąpi po zejściu.
Bibliografia
- Figueroa, zm. (2005). Seria: Fizyka nauk i inżynierii. Tom 1. Kinematyka. Pod redakcją Douglas Figueroa (USB).69-116.
- Giancoli, zm. Fizyka. (2006). Zasady z aplikacjami. 6th Wydanie. Prentice Hall. 22-25.
- Kirkpatrick, L. 2007. Fizyka: spojrzenie na świat. 6ta Skrócone wydanie. Cengage Learning. 23 - 27.
- Resnick, r. (1999). Fizyczny. Tom 1. Trzecie wydanie po hiszpańsku. Meksyk. Continental Editorial Company S.DO. c.V. 21-22.
- Rex, a. (2011). Podstawy fizyki. osoba. 33 - 36
- Sears, Zemansky. 2016. Fizyka uniwersytecka z nowoczesną fizyką. 14th. Wyd. Tom 1. 50 - 53.
- Serway, r., Jewett, J. (2008). Fizyka nauk i inżynierii. Tom 1. 7mama. Wydanie. Meksyk. Redaktorzy edukacyjni Cengage. 23-25.
- Serway, r., Vulle, c. (2011). Podstawy fizyki. 9na Wyd. Cengage Learning. 43 - 55.
- Wilson, J. (2011). Fizyka 10. Edukacja Pearsona. 133 - 149.