

Ilość pędu kątowego, ochrona, przykłady, ćwiczenia
- 3048
- 961
- Estera Wojtkowiak
On moment pędu o Ilość ruchu kątowego jest, dla ruchu obrotowego, jaki jest moment liniowy dla ruchu tłumaczenia. Jest to wielkość wektora, która charakteryzuje obrót punktualnej cząstki lub rozszerzony obiekt wokół osi, który przechodzi przez punkt.
Oznacza to, że ilekroć zostanie obliczone pęd kątowy, osi obrotu musi być wygodnie określony.
Zaczynając od materialnego punktu masy m, pęd kątowy jest oznaczony przez L, moment liniowy jako P oraz położenie cząstki w odniesieniu do osi, która przechodzi przez określony punkt lub jest R, Więc:
L = R X P
Bold litery są zarezerwowane dla wielkości wektora, a krzyż oznacza, że pęd kątowy jest produktem wektorowym między wektorem pozycji R i moment liniowy P cząstki. Wektor wynikający z produktu wektorowego jest prostopadle do płaszczyzny utworzonej przez uczestniczące wektory.
Oznacza to, że kierunek i poczucie L Można je znaleźć z zasady prawej ręki dla produktu krzyżowego.
W międzynarodowym systemie jednostek jednostki pędu kątowego wynoszą KGl2/s, które nie mają specjalnej nazwy. A dla rozszerzonego ciała, które składa się z wielu cząstek, poprzednia definicja jest wygodnie rozszerzona.
[TOC]
Ilość ruchu kątowego
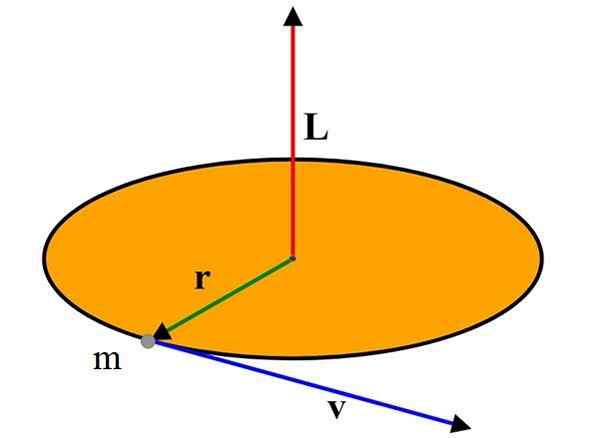
Zależność między wektorami pędu kątowego w odniesieniu do danego punktu lub czasu liniowego dla punktualnej cząstki, która porusza się w okręgu. Źródło: Zmodyfikowane przez F. Zapata z Wikimedia Commons. Wielkość wektora pędu kątowego jest zgodnie z definicją produktu wektorowego:
L = r⋅m⋅V⋅Sen ϕ = mv (r⋅sen ϕ) = mvℓ
Gdzie ϕ jest kątem między wektorami R I v. Wówczas ℓ = r sen ϕ jest prostopadłą odległością między linią v I punkt lub.
W przypadku cząstki, która porusza się opisującym obwód pokazany na górnym obrazie, kąt ten wynosi 90º, ponieważ prędkość jest zawsze styczna do obwodu, a zatem prostopadły do promienia.
Dlatego Sen 90º = 1 i wielkość L Jest:
L = M⋅R⋅V
Moment bezwładności
Moment bezwładności sztywnego ciała opisuje bezwładność ciała przed obrotem wokół pewnej osi.
Zależy to nie tylko od ciała ciała, ale także od odległości do osi obrotu. Jest to łatwo zrozumiałe, gdy myśląc, że w przypadku niektórych obiektów łatwiej jest się obrócić w odniesieniu do niektórych osi niż dla innych.
W przypadku układu cząstek moment bezwładności, oznaczony literą I, jest podany przez:
Może ci służyć: przyspieszenie kątoweI = ∑ rSiema2 ΔmSiema
Gdzie ΔmSiema Jest to niewielka część ciasta i rSiema Jest to odległość od osi obrotu. Rozszerzone ciało składa się z wielu cząstek, stąd jego moment całkowitej bezwładności jest suma wszystkich produktów między masą a odległością, cząstek, które ją tworzą.
Jeśli jest to rozszerzone ciało, lato zmienia się w całkę i Δm Staje się masową różnicą DM. Limity integracji zależą od geometrii obiektów:
I = ∫M (R2) DM
Pojęcie momentu bezwładności jest ściśle związane z pędem kątowym rozszerzonego obiektu, jak wtedy zobaczymy.
Pęd kątowy układu cząstek
Rozważ układ cząstek, złożony z masy ΔmSiema który obraca się po okręgu w płaszczyźnie Xy, Każda z nich ma liniową prędkość związaną z prędkością kątową, która dla wszystkich cząstek:
vSiema = ΩrSiema
Gdzie rSiema Jest to odległość do osi obrotu lub. Zatem wielkość pędu jest:
LSiema = ΔmSiema. RSiema. (ΩrSiema) = RSiema2Ω ΔmSiema
Suma: pęd kątowy systemu:
L = Ω ∑ rSiema2 ΔmSiema
Szybko identyfikujemy moment bezwładności, jak zdefiniowano w poprzednim rozdziale, a zatem wielkość jego pędu kątowego pozostaje taka:
L = Iω
Jak powiedzieliśmy, że układ cząstek był w płaszczyźnie XY, okazuje się, że pęd kątowy jest skierowany wzdłuż osi Z, prostopadle do wspomnianego płaszczyzny. Znaczenie jest nadane przez obrót: moment kątowy.
Rozszerzone ciało można podzielić na plastry, każde z momentem pędu podanym przez L = Iω skierowane wzdłuż osi Z. Jeśli osi symetrii obiektu pokrywa się z osą Z, nie ma problemu, ponieważ nawet w przypadku punktów, które nie są w płaszczyźnie XY, składniki pędu kątowego prostopadłe do wspomnianej osi są anulowane.
Wektorowo:
L = IΩ
To równanie jest ważne dla trzech obiektów wymiarowych, które obracają się wokół osi symetrii.
Kiedy zmienia się pęd kątowy?
Kiedy siła netto działa na cząsteczkę lub ciało, jej moment liniowy może się zmienić, w związku z czym również zrobi pęd kątowy. Aby wiedzieć, kiedy będziemy się różnić, używamy pochodnej, która da nam tempo zmian w czasie, jeśli istnieje:
Może ci służyć: tlenek krzemu (SiO2): struktura, właściwości, użycie, uzyskiwanie)
Zastosowanie zasady produktu do pochodnej:
+\left&space;(\mathbfr\times&space;\fracd\mathbfpdt&space;\right&space;))
Termin v x mv Jest nieważny, ponieważ jest produktem wektora ze sobą, aw drugim okresie znajdujemy siłę netto F = mDo, W związku z tym:

Produkt wektorowy R X F To nic innego jak moment obrotowy lub moment skrętu netto, czasem oznaczany greckim tekstem τ lub jako M, Zawsze odważne, ponieważ jest to kwota wektorowa. Następnie, analogicznie z momentem liniowym, pęd kątowy zmienia się, o ile istnieje moment obrotowy lub moment skrętu netto:
DL/dt = M
Ochrona pędu kątowego
Z poprzednich sekcji widzieliśmy to:
DL/dt = M
Oznacza to, że pęd kątowy zmienia się, gdy jest moment skrętu netto. Jeśli nie ma momentu skrętu netto, to:
DL/dt = 0 → L To jest stałe
Innymi słowy:
Początkowy pęd kątowy = końcowy pęd kątowy
Ten wynik jest nadal ważny w przypadku, gdy ciało nie jest sztywne, jak zobaczymy w następujących przykładach.
Przykłady
Pęd kątowy jest ważną wielością ujawnioną w wielu sytuacjach, co pokazuje, jak uniwersalne jest:
Łyżwiarstwo artystyczne i inne sporty
 Po lewej stronie łyżwia zaczyna obracać się z wydłużonymi ramionami, po prawej, kurczy ramiona o ciało i przekracza nogi, aby zwiększyć prędkość obrotową. Źródło: Wikimedia Commons.
Po lewej stronie łyżwia zaczyna obracać się z wydłużonymi ramionami, po prawej, kurczy ramiona o ciało i przekracza nogi, aby zwiększyć prędkość obrotową. Źródło: Wikimedia Commons. Ilekroć ciało, które się zmienia, ma wzrost, jego prędkość obrotowa, to dobrze zna łyżwiarzy.
Dzieje się tak, ponieważ gdy kurczymy ramiona i nogi, moment bezwładności I zmniejsza się, gdy odległość między jej częściami maleje, ale w miarę zachowania pędu kątowego, aby utrzymać stałą produkt Iω, prędkość kątowa musi zwiększyć.
Jest to ważne nie tylko w łyżwiarstwie, ale także w sporcie i zajęciach, w których Turns muszą.
Koty stoją

Koty zawsze naprawiają je, aby wylądować na czworakach, gdy upadną. Nawet jeśli nie mają ilości początkowego ruchu, upewniają się, że szybko obracają nogi i ogon, aby zmienić bezwładność rotacji i naprawić je, aby wstać.
Podobnie podczas manewrowania, ich pęd kątowy jest nieważny, ponieważ ich rotacja nie jest ciągła.
Ruch frisbee

Frisbee musi zostać uruchomiony, drukując go do latania, ponieważ w przeciwnym razie upadnie. Rzeczywiście, moment kątowy.
Może ci służyć: fale stacjonarne: wzory, cechy, typy, przykładyPiłki w sporcie

Baseball, piłka nożna, koszykówka i inne piłki sportowe mają kanciastowy pęd. Ponieważ są kuliste, mają chwilę bezwładności i podczas gry są obracane. Jak moment bezwładności kuli jest:
I = (2/5) MR2
Gdzie m jest masą piłki i r promieniem, moment bezwładności w odniesieniu do pewnej osi (ustalony) wynosi:
L = (2/5) MR2Ω
Księżyc
Księżyc odsuwa się od Ziemi, ponieważ prędkość obrotu ziemi maleje z powodu tarcia między dużymi masami wodnymi a tłem morza.
System Ziemi-Luna zachowuje swój moment kątowy.
Atom
Pierwszy postulat modelu atomowego Bohra stwierdza, że elektron zajmuje tylko orbity tam, gdzie pęd kątowy jest całą wielokrotnością H/2π, Gdzie H jest stałą Plancka.
Ćwiczenie rozwiązane
Cienka stalowa pręt ma masę 500 g i długość 30 cm. Obraca się wokół osi, która przechodzi przez jej centrum z prędkością 300 obrotów na minutę. Określ moduł jego ilości ruchu kątowego.
Rozwiązanie
Będziemy potrzebować momentu bezwładności pręta odnoszącego się do osi, która przechodzi przez jej środek. Konsultowanie pędu bezwładności stwierdzono, że:
I = (1/12) ml2 = (1/12) × 0.5 kg x (30 × 10-2 M)2 = 3.75 × 10-3 kg.M2
Ponieważ jest to rozszerzone ciało, które znamy prędkość kątową, używamy:
L = Iω
Zanim przekształcimy prędkość kątową lub częstotliwość kątową Ω do Radianes/s:
Ω = (300 obrotów/minutę) × (1 minuta/60 sekund) x (2π radian/rewolucja) = 10 π rad/s/s
Zastąpienie:
L = 3.75 x10-3 kg⋅m2 × 10 π rad/s = 0.118 kg⋅m2 / S
Bibliografia
- Bauer, w. 2011. Fizyka inżynierii i nauki. Tom 1. MC Graw Hill.
- Giambattista, a. 2010. Fizyka. 2. Wyd. McGraw Hill.
- Giancoli, zm. 2006. Fizyka: zasady z aplikacjami. 6th. Ed Prentice Hall.
- Knight, r. 2017. Fizyka dla naukowców i inżynierii: podejście strategiczne. osoba.
- Serway, r., Jewett, J. (2008). Fizyka nauk i inżynierii. Tom 1. 7th. Wyd. Cengage Learning.
- Tippens, s. 1. 2011. Fizyka: koncepcje i zastosowania. 7. edycja. McGraw Hill.