

Charakterystyka wektorów równoległych, przykłady i ćwiczenia
- 2444
- 1
- Filip Augustyn
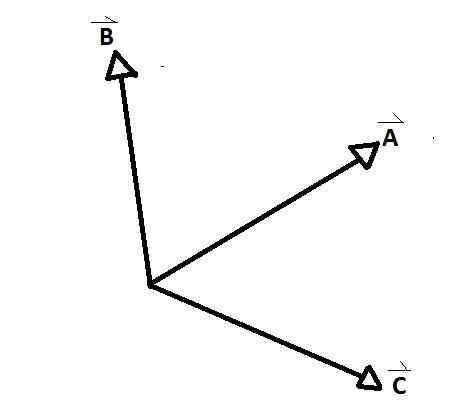
Wektory współbieżne Są to grupy wektorów, których osie pokrywają się w jednym punkcie, tworząc między nimi kąt wewnętrzny i zewnętrzny. Wyraźny przykład obserwuje się na dolnej figurze, gdzie A, B i C są ze sobą współbieżnymi wektorami.
D i E w przeciwieństwie do reszty nie są. Istnieją kąty wśród współbieżnych wektorów AB, AC i CB. Nazywane są kąty relacji między wektorami.
[TOC]
Charakterystyka
-Mają wspólny punkt, który pokrywa się z ich pochodzeniem: wszystkie wielkości współbieżnych wektorów zaczynają się od wspólnego punktu do ich odpowiednich skrajności.
-Pochodzenie jest uważane za punkt działania wektorowego: należy ustalić punkt działania, na który wpłynie bezpośrednio każdy z współbieżnych wektorów.
-Twoja domena w płaszczyźnie i przestrzeni jest R2 i r3 odpowiednio: Wektory współbieżne mogą swobodnie pokryć całą przestrzeń geometryczną.
-Pozwala na różne notacje w tej samej grupie wektorów. Według gałęzi badań, w operacjach z wektorami występują różne zapisy.
Rodzaje wektorów
Gałąź wektorów ma wiele podziałów, wśród niektórych można je wyznaczyć: równolegle, prostopadłe, coplanarios, odpowiadające, przeciwne i jednolite. Wektory współbieżne pojawiają się na tej liście i podobnie jak wszystkie wcześniej wyznaczone, mają wiele wniosków w różnych naukach.
Są bardzo powszechne w badaniu wektorowym, ponieważ reprezentują opłacalne uogólnienie w operacjach z nimi. Zarówno w płaszczyźnie, jak i w przestrzeni, współbieżne wektory są do bieżącego zastosowania do reprezentacji różnych elementów i badają ich wpływ na dany system.
Notacja wektorowa
Istnieją różne sposoby reprezentowania elementu wektora. Główne i najbardziej znane to:
kartezjański
Zaproponowane przez to samo matematyczne podejście, oznacza wektory z listą odpowiadającą wielkościom każdej osi (x, y, z)
A: (1, 1, -1) Space A: (1, 1) planuj
Polarny
Służy one tylko do oznaczania wektorów w płaszczyźnie, chociaż w obliczeniach całkowym przypisuje się komponent głębokości. Składa się z wielkością liniową R i kąt w odniesieniu do osi polarnej Ɵ.
Może ci służyć: statystyki wnioskowania: historia, cechy, do czego służy przykładyOdp.: (3, 450 ) Plan A: (2, 450 , 3) Przestrzeń
Analityczny
Zdefiniuj wielkości wektora przez versors. Versorory (R&E + K) reprezentują wektory jednostkowe odpowiadające osiom X, y I
A: 3i + 2J - 3k
Kulisty
Są podobne do notacji polarnej, ale z dodaniem drugiego kąta, który zamiatuje się na płaszczyźnie Xy symbolizowane przez δ.
Odp.: (4, 60albo , π/4)
Operacje z współbieżnymi wektorami
Wektory współbieżne są najczęściej używane do definiowania operacji między wektorami, ponieważ łatwiej jest porównać elementy wektorów, gdy występują w sposób jednoczesny.
Suma (a + b)
Suma współbieżnych wektorów ma na celu znalezienie powstałego wektora VR. Który, zgodnie z gałęzią badań, odpowiada ostatecznemu działaniu
Na przykład: 3 sznurki są powiązane a, b, c do pudełka, każdy koniec liny znajduje się w rękach tematu. Każdy z 3 osób musi wyciągnąć linę w innym kierunku niż pozostałe 2.
A: (AX, AY, AZ) B: (BX, BY, BZ) C: (CX, CY, CZ)
A+b+c = (ax+bx+cx; ay+przez+cy; az+bz+c) = VR
Dlatego pudełko może poruszać się tylko w jednym kierunku VR Wskazuje kierunek i poczucie przemieszczenia pudełka.
Różnica (a - b)
Istnieje wiele kryteriów dotyczących różnicy między wektorami, wielu autorów decyduje się go wykluczyć i twierdzi, że tylko suma między wektorami jest określona, gdzie różnica jest sumą przeciwnego wektora. Prawda jest taka, że wektory algebraicznie można odejmować.
A: (Ax, ay, az) B: (Bx, BY, Bz)
A-b = a + (-b) = (ax-bx; ay-be; az-bz) = [ax + (-bx); ay + (-By); AZ + (-bz)]
Produkt skalarny (a . B)
Znany również jako produkt Punto, generuje wartość skalarną, która może być powiązana z kilkoma wielkościami zgodnie z gałęzią badania.
Dla geometrii wskazuje obszar równoległoboku utworzony przez parę równoczesnych wektorów za pomocą metody równoległoboku. Dla fizyki mechanicznej określa pracę wykonaną siłą F Przesuwając ciało na odległość ΔR.
Może ci służyć: proporcjonalność złożona: wyjaśnienie, trzy złożone reguły, ćwiczeniaѡ = f . ΔR
Jak sama nazwa wskazuje, generuje wartość skalarną i jest zdefiniowana w następujący sposób:
Być wektorami a i b
A: (Ax, ay, az) B: (Bx, BY, Bz)
-Forma analityczna:
( DO . B) = | A |.| B |.Cos θ
Gdzie θ jest wewnętrznym kątem między obiema wektorami
-Forma algebraiczna:
( DO . B) = (AX.BX + AY.przez + az.BZ)
Produkt wektorowy (a x b)
Wektor lub produkt punktowy między dwoma wektorami definiuje trzeci wektor C to ma jakość bycia prostopadłym B I C. W fizyce określa moment obrotowy wektor τ Podstawowy element dynamiki rotacyjnej.
-Forma analityczna:
|. A x b | = | A |.| B |.Sin θ
-Forma algebraiczna:
(A x B) = = (AX . przez - ay . Bx)- (AX . BZ - AZ . Bx) J + (Topór . przez - ay . Bx) k
-Ruch względny: rA/b
Podstawą względności jest ruch względny, a równoległe wektory są podstawą ruchu względnego. Możesz wydedukować pozycje, prędkości i względne przyspieszenia, stosując następującą kolejność pomysłów.
R A/b = rDO - RB ; Względna pozycja dotycząca B
v A/b = vDO - vB ; Względna prędkość szacunku do B
Do A/b = aDO - DoB ; Względne przyspieszenie szacunku dla B
Przykłady: Rozwiązane ćwiczenia
Ćwiczenie 1
Niech wektory współbieżne A, B i C.
A = (-1, 3, 5) b = (3, 5, -2) c = (-4, -2, 1)
-Zdefiniuj wynikowy wektor VR = 2a - 3b + c
2a = (2 (-1), 2 (3), 2 (5)) = (-2, 6, 10)
-3B = (-3 (3), -3 (5), -3 (-2)) = (-9, -15, 6)
VR = 2a + (-3b) + c = (-2, 6, 10) + (-9, -15, 6) + (-4, -2, 1)
VR = ([-2+(-9)+(-4)]; [6+(-15)+(-2)]; (10+6+1)))
VR = (-15, -11, 17)
-Zdefiniuj produkt skalarny (a . C)
( DO . C) = (-1, 3, 5) . (-4, -2, 1) = (-1) (-4) + 3 (-2) + 5 (1) = 4-6 + 5
( DO . C) = 3
-Oblicz kąt między A i C
( DO . C) = | a |.| C |.Cos θ gdzie θ jest najkrótszym kątem wśród wektorów




θ = 88,630
-Znajdź wektor prostopadły do A i B
W tym celu konieczne jest zdefiniowanie produktu wektora między (-1, 3, 5) i (3, 5, -2). Jak wyjaśniono wcześniej, zbudowana jest matryca 3 x 3, w której pierwszy rząd składa się z listy wektorów jednostkowych (I, J, K). Następnie drugi i trzeci rząd składa się z wektorów do obsługi.
Może ci służyć: notacja dziesiętna(A x B) = = [(-1) . 5 - (3 . 3)] Siema - [(-1) . (-2) - (5 . 3)] J + [(-1) . 5 - (3 . 3)] k
(A x B) = (-5 - 9) Siema - (2 - 15) J + (-5 - 9) k
(A x B) = -14 i + 13 J - 14 K
Ćwiczenie 2
Niech vDo i vB Wektory prędkości odpowiednio A i B. Oblicz prędkość B na podstawie.
VDo = (3, -1, 5) vB = (2, 5, -3)
W tym przypadku wymagana jest względna prędkość B VB/a
VB/a = VB - VDO
VB/a = (2, 5, -3) -(3, -1, 5) = (-1, 6, -8)
To jest wektor Veloc B widziany z A. Gdzie nowy wektor prędkości B jest opisany przez odniesienie do obserwatora ustawionego w a i poruszającym się z prędkością.
Proponowane ćwiczenia
1-konstruktu 3 wektory A, B i C, które są jednocześnie i opowiadają 3 operacje między nimi poprzez praktyczne ćwiczenie.
2 -Wektory A: (-2, 4, -11), B: (1, -6, 9) i C: (-2, -1, 10). Znajdź wektory prostopadłe do: a i b, c i b, suma a + b + c.
4-determina 3 wektory, które są do siebie prostopadłe, bez uwzględnienia osi współrzędnych.
5 Odefiniuj pracę wykonaną siłą, która podnosi 5 kg bloku masy, z dna studni o głębokości 20 m.
6-Swamker Algebraica, że odejmowanie wektorów jest równe sumie przeciwnego wektora. Uzasadnić swoje postulaty.
7-deenote wektor we wszystkich notacjach opracowany w tym artykule. (Kartezjański, polarny, analityczny i sferyczny).
8-Siły magnetyczne wywierane na magnes, który spoczywa na tabeli, są podawane przez następujące wektory; V: (5, 3, -2), T: (4, 7, 9), H: (-3, 5, -4). Określ w jakim kierunku magnes porusza się, jeśli wszystkie siły magnetyczne działają jednocześnie.
Bibliografia
- Geometria i transformacje euklidesowe. Clayton w. Unik. Couer Corporation, 1 stycznia. 2004
- Jak rozwiązać problemy z matematyką l. Moiseiwitsch. Couer Corporation, 10 kwietnia. 2013
- Podstawowe pojęcia geometrii. Walter Prenowz, Meyer Jordan. Rowman & Littlefield, 4 października. 2012
- Wektory. Rocío Navarro Lacoba, 7 czerwca. 2014
- Algebra liniowa. Bernard Kolman, David R. WZGÓRZE. Pearson Education, 2006
- « Charakterystyka, przygotowanie i zastosowania Timolphtaleina
- Historia atomizmu, teoria, postulaty i przedstawiciele »