

Wektory Graphic Subs
- 1341
- 210
- Prokul Woliński
Odejmowanie wektora o Odejmowanie wektora między wektorami Lub I v oznaczony przez Lub - v, Jest obliczany przez dodanie wektora Lub z przeciwnym wektorem v. Algebraicznie odjęcie jest wyrażane w następujący sposób:
Lub - v = Lub + (-v)
Możliwe jest przeprowadzenie odejmowania wektorów zgodnie z różnymi procedurami, na przykład w formie graficznej, w ten sposób wektor v Jest rysowany przez zorientowany segment linii -strzałka-.
Długość strzałki odpowiada module wektora, nachylenie - w odniesieniu do danej linii odniesienia - wskazuje kierunek, a koniec wskazuje kierunek wektora.
Wektor przeciwny v Ma taką samą długość i kierunek, ale poza tym. Następnie przed odejmowaniem między Lub I v, Konieczne jest narysowanie przeciwnego wektora v, i dodaj ten wektor do u.
Bardzo ważne jest, aby podkreślić, że odejmowanie wektorów nie jest zgodne, to znaczy, że kolejność wektorów zmienia zatem wynik:
Lub - v ≠ v - Lub
Procedurę graficzną można przeprowadzić przy użyciu dowolnej z tych metod, których kroki wyjaśnimy poniżej:
-Metoda trójkąta.
-Metoda równoległobramowa.
[TOC]
Graficzna metoda wektora podgraficzna
Metoda trójkąta
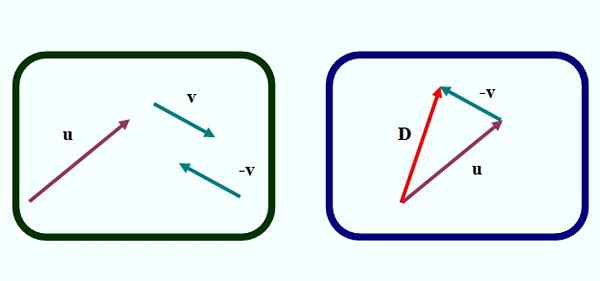
Rysunek 1. Wektory złożenia zgodnie z metodą trójkąta. Źródło: f. Zapata. Na rycinie 1 mamy pierwszą z metod odejmowania dwóch wektorów graficznych. To jest o Metoda trójkąta, Ponieważ liczba, która powstaje podczas ustanowienia wektorów, jest trójkątem, jak widzimy na lewym obrazie.
Do odjęcia Lub - v Postępujemy następująco:
-Narysuj wektor -v Z wektora v, przez tłumaczenie z regułą i oddziałem, ale zmiana kierunku strzałki (lewy obraz).
-Przenosi się do wektora -v w taki sposób, że jego pochodzenie pokrywa się z końcem wektora Lub (Właściwy obraz).
Może ci służyć: tarcie: typy, współczynnik, obliczenia, ćwiczenia-Następnie rysowany jest wektor (na czerwono na prawym obrazie), który wychodzi z pochodzenia Lub do końca v. Dzwonić D I jest to różnica wektorów:
D = Lub - v
Metoda równoległobramowa
W metodzie równoległoboku wektory do dodawania lub odejmowania muszą pokryć się w ich punktach pochodzenia. Załóżmy, że chcemy znaleźć Lub - v Z naszymi wektorami pokazanymi powyżej kroki do znalezienia odejmowania wektorów tą metodą są następujące:
-Określ przeciwny wektor v, co jest -v, Jak opisano wcześniej dla metody trójkąta.
-Uważnie weź wektory Lub I -v w taki sposób, że jego początki się pokrywają.
-Teraz segmentowane linie równoległe są pobierane z końców każdego wektora. Utworzona liczba jest równoległobokiem, aw szczególnych przypadkach, w których wektory są prostopadłe, jest to prostokąt lub kwadratowy.
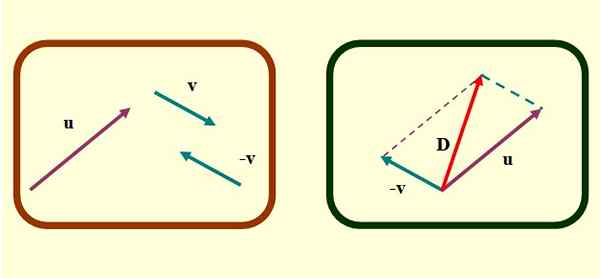 Rysunek 2. Metoda równoległobramowa do odejmowania wektora. Źródło: f. Zapata.
Rysunek 2. Metoda równoległobramowa do odejmowania wektora. Źródło: f. Zapata. -Wreszcie wektor, który zaczyna się od wspólnego pochodzenia Lub I v do końca, w którym przecinane są segmentowane linie równoległe. To jest wektor D lub odejmowanie.
Ważny
Innym sposobem na odejmowanie jest narysowanie równoległoboku, jakbyś chciał dodać wektory.
Ale zamiast rysować zwykłą przekątę sum Ukośne przeciwieństwo lub krótsze, Jak widać na rysunku:
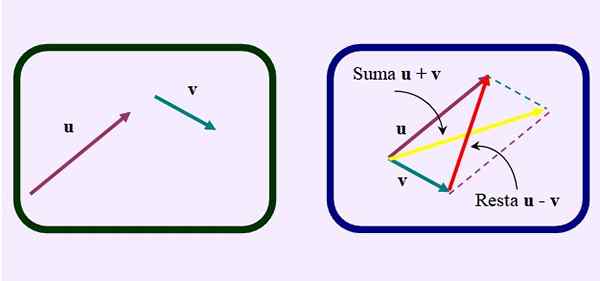 Rysunek 3. Inny sposób przeprowadzenia odejmowania wektora metodą równoległoboku. Źródło: f. Zapata.
Rysunek 3. Inny sposób przeprowadzenia odejmowania wektora metodą równoległoboku. Źródło: f. Zapata. Przykłady odejmowania wektora
- Przykład 1
Statek nawiguje do rzeki i robi to w przeciwnym kierunku od prądu. Obserwator na ziemi zauważa, że prędkość statku jest zmniejszona z powodu działania prądu.
Może ci służyć: co z energią zawartą w materiałach?Prędkość jest wektorem i w tym przykładzie prędkość statku wskazuje w jednym kierunku, a prędkość prądu ma ten sam kierunek i przeciwny kierunek. Prędkość netto statku jest sumą obu wektorów.
Na przykład, jeśli instrumenty statku. Jako v = v ' +vc, będąc vc prędkość prądu obliczona odpowiednio przez odjęcie prędkości v i v': vc = v - v '= 30 km/h - 40 km/h = -10 km// H.
- Przykład 2
W kinach mamy ważne wektory, które opisują zmiany:
-Przemieszczenie zmian w pozycji.
-Średnia prędkość, aby określić ilościowo, jak szybko pozycja zmienia się w czasie.
-Przyspieszenie, dla modyfikacji prędkości w funkcji czasu.
Wektor przemieszczenia
Wektor przemieszczenia opisuje zmianę pozycji, której organizm doświadcza w trakcie swojego ruchu.
Zobaczmy na przykład cząsteczkę opisującą płaską trajektorię pokazaną na rysunku, na której przechodzi od punktu P1 do punktu p2.
Wektory skierowane z pochodzenia układu współrzędnych X-y do tych punktów to wektory pozycji R1 I R2, Podczas gdy wektor przemieszczenia wynosi δR, Od p1 P2. To prawda, że:
ΔR = R2 - R1
Dlatego wektor przemieszczenia jest odejmowaniem między końcowym wektorem położenia a początkowym wektorem położenia, jak zauważono na poniższym rysunku. Jego jednostki są również elementami pozycji: mierniki, stopy, mile, centymetry i więcej.
Może ci służyć: perseus (konstelacja): lokalizacja, mitologia i cechy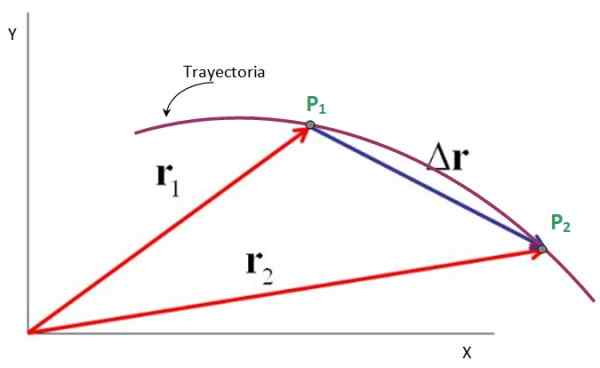 Rysunek 4. Wektor przemieszczenia jest różnicą między pozycją końcową a początkową. Źródło: f. Zapata.
Rysunek 4. Wektor przemieszczenia jest różnicą między pozycją końcową a początkową. Źródło: f. Zapata. Średnia prędkość i średnie wektory przyspieszenia
Ze swojej części średnia prędkość wektor vM Jest zdefiniowany jako przemieszczenie pomnożone przez odwrotność przedziału czasowego:

Ćwiczenie rozwiązane
Cząstka opisująca koło zajmuje 5 s, aby przejść z punktu A do punktu B. W a vDO = 60 km/h w kierunku osi +x i b vB = 60 km/h w kierunku +i. Określić jego średnie przyspieszenie w formie graficznej i analitycznej.
Rozwiązanie
W grafice kierunek i znaczenie średniego przyspieszenia są określane przez:
Na poniższym obrazie jest odejmowanie vB - vDO, metodą trójkąta, ponieważ średnie przyspieszenie DoM jest proporcjonalny do δv. Utworzony trójkąt ma dwie kategorie równe, a zatem ostre kąty wewnętrzne mierzą 45 °.
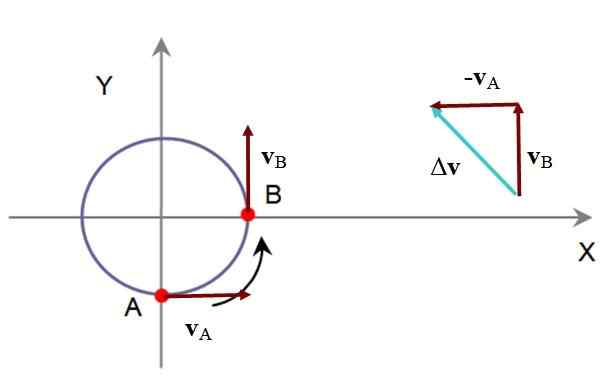 Rysunek 5. Schemat ruchu cząstek rozwiązanego przykładu. Źródło: f. Zapata.
Rysunek 5. Schemat ruchu cząstek rozwiązanego przykładu. Źródło: f. Zapata. Analitycznie, jeśli adres +x pokrywa się z wektorem jednostki Siema oraz adres +i z wektorem jednostki J, Więc:
Δv = 60 km/h J - 60 km/h Siema
Przyjmując δT = 5 s, zgodnie z informacją o stwierdzeniu, średnie przyspieszenie wynosi:
DoM = (60 km/h J - 60 km/h Siema) / 5 s = 12 (J-Siema) Km/(h.S)
Bibliografia
- Bauer, w. 2011. Fizyka inżynierii i nauki. Tom 1. MC Graw Hill.
- Bedford, 2000. DO. Mechanika inżynierii: statyczne. Addison Wesley.
- Figueroa, zm. (2005). Seria: Fizyka nauk i inżynierii. Tom 1. Kinematyka. Pod redakcją Douglas Figueroa (USB).
- Giambattista, a. 2010. Fizyka. 2. Wyd. McGraw Hill.
- Sears, Zemansky. 2016. Fizyka uniwersytecka z nowoczesną fizyką. 14. Wyd. Tom 1.
- Tipler, str. 2006. Fizyka nauk i technologii. Ed. Tom 1. Redakcja Reverted.